Auswahl des richtigen Motors für leichte Robotikanwendungen
Bei der Entwicklung eines Robotergelenks müssen viele Faktoren sorgfältig berücksichtigt werden. Bei der Auswahl von Motoren für Humanoide, Roboter mit Beinen (oder Roboterhunde), kollaborative Roboter (Cobots) und andere leichte Roboteranwendungen hat jedes einzelne Design spezifische Anforderungen.
February 26, 2025
.png)
Was ist Light Robotics?
Leichtbauroboter, oder „Leichtroboter“, sind so konzipiert, dass sie sich effizient über unsicheres Gelände bewegen und in der Regel in unmittelbarer Nähe von Menschen oder in Zusammenarbeit mit ihnen arbeiten. Diese Roboter müssen wendig, mobil und stark sein, dürfen aber nicht gefährlich sein. Sie müssen auch in der Lage sein, plötzlichen Stößen und Kräften standzuhalten. Humanoide, Roboter mit Beinen und Cobots sind einige Beispiele für Roboter, die unter diese Kategorie fallen.
Humanoide
Humanoide sind Mehrzweckroboter, die Menschen ähneln. Sie sind oft so konzipiert, dass sie Menschen bei verschiedenen Aufgaben unterstützen oder sie ersetzen, beispielsweise bei der Erledigung von Hausarbeiten, beim Heben und Tragen von Gegenständen in Fabriken oder beim Erkunden potenziell gefährlicher Umgebungen. Um menschliche Bewegungen nachzuahmen, sind Humanoide mit mehreren beweglichen Gliedmaßen und Gelenken ausgestattet, von denen jedes durch Motoren angetrieben werden muss. Diese Motoren müssen in Größe, Form und Leistungsfähigkeit variieren, um den spezifischen Anforderungen jedes Gelenks und Aktuators gerecht zu werden.
Roboter mit Beinen
Roboter mit Beinen, wie Vierbeiner, verfolgen einen ähnlichen Designansatz wie Humanoide, aber anstatt Menschen zu ähneln, ähneln sie Tieren (z. B. Hunden). Diese Roboter übernehmen Aufgaben wie Inspektion, Erkundung und Auslieferung in Umgebungen, die für Menschen gefährlich oder körperlich anstrengend sein können. Durch die Unterstützung menschlicher Arbeiter steigern diese Roboter die Produktivität und erhöhen gleichzeitig die Sicherheit. Wie Humanoide benötigen auch Roboter mit Beinen starke, leichte und kompakte Motoren, um die Betriebszeit zu maximieren und anspruchsvolle Aufgaben zu bewältigen.
.png)
Kollaborative Roboter
Cobots, oder kollaborative Roboter, sind so konzipiert, dass sie mit Menschen in gemeinsamen Räumen zusammenarbeiten. Sie erledigen Aufgaben wie das Heben schwerer Gegenstände, das Kommissionieren und Platzieren von Gegenständen mit hoher Präzision und Wiederholbarkeit oder die Durchführung von Inspektionen. Da Cobots in der Nähe von Menschen operieren, hat Sicherheit oberste Priorität. Im Gegensatz zu größeren Robotern, die in der Regel hinter Schutzbarrieren isoliert sind, müssen Cobots in der Lage sein, sicher mit Menschen zu interagieren.
Andere Beispiele für leichte Roboter sind Erkundungsroboter, die entwickelt wurden, um in unsicherem Gelände zu navigieren, z. B. in Trümmern nach einem Erdbeben oder tief in Höhlen. Diese Roboter müssen sich schnell anpassen und auf plötzliche Veränderungen der äußeren Kräfte reagieren.
Die Bedeutung der Drehmomentdichte
Bei der Entwicklung von Leichtbaurobotern sind Gewicht und Festigkeit die beiden wichtigsten Faktoren, die es zu berücksichtigen gilt. Beide spielen eine wichtige Rolle bei der Auswahl von Aktuatoren für Robotergelenke. Diese Roboter müssen leicht sein, um über einen längeren Zeitraum betrieben zu werden, und gleichzeitig stark genug sein, um komplexe Aufgaben auszuführen. Die Drehmomentdichte ist der Schlüssel zur Erreichung dieses Gleichgewichts.
Die Gelenke dieser Roboter sind oft in Reihe geschaltet oder sie müssen ihr eigenes Gewicht heben, sodass die Motoren Teil der beweglichen Nutzlast werden. Dadurch entsteht ein verstärkender Effekt, der sich über mehrere Stufen erstreckt. Eine hohe Drehmomentdichte stellt sicher, dass jedes Gelenk die erforderliche Kraft aufbringen kann und gleichzeitig das Gewicht minimiert wird.
Gezielte Lösungen
Eine Möglichkeit, eine hohe Drehmomentdichte zu erreichen, sind Getriebelösungen. Ein Zahnradgetriebe kann das Ausgangsdrehmoment eines kleineren Motors erhöhen. Es ist jedoch auch wichtig, das Rückwärtsfahren zu berücksichtigen – die Fähigkeit des Motors, sich bei Einwirkung einer äußeren Kraft in die entgegengesetzte Richtung zu bewegen. Wenn beispielsweise jemand nach einem Roboterarm greift und ihn in eine andere Richtung bewegt, sollte der Motor/Aktuator diese Bewegung berücksichtigen. Dies ist notwendig, um sichere Interaktionen zwischen Robotern und Menschen zu gewährleisten und den Transport zu erleichtern, insbesondere im ausgeschalteten Zustand.
Daher werden Getriebe mit einem niedrigen Übersetzungsverhältnis bevorzugt. Ein niedriges Übersetzungsverhältnis sorgt dafür, dass die Rücktriebskräfte gering bleiben und das Gelenk gleichzeitig flexibel auf plötzliche Stöße reagieren kann. Quasi-Direktantriebe (QDD) verhalten sich ähnlich wie Direktantriebe, haben jedoch ein niedriges Übersetzungsverhältnis.
Drehmomentmessung in Robotergelenken
Die Drehmomentmessung ist für die Leichtbaurobotik von entscheidender Bedeutung, da sie in Echtzeit Feedback über das an einem bestimmten Gelenk ausgeübte Drehmoment liefert. Dieses Feedback ermöglicht eine präzise Steuerung, Sicherheit und eine reibungslose Interaktion mit Objekten und Menschen. Zu diesem Zweck werden häufig spezielle Drehmomentsensoren verwendet, die jedoch zusätzliche Kosten, Masse und Komplexität mit sich bringen. Wenn die Nichtlinearitäten des Robotergelenks eliminiert werden können, kann das Drehmoment gemessen werden, ohne dass ein separater Drehmomentsensor erforderlich ist.
Herkömmliche geschlitzte Motoren haben Eisenzähne, die den Magnetfluss konzentrieren. Diese Eisenzähne erzeugen eine asymmetrische magnetische Wechselwirkung zwischen Rotor und Stator, was zu einem Rastmoment führt. Im Gegensatz dazu verwenden nichtgeschlitzte Motoren einen einfachen, ringförmigen Lamellenkern, der das Rastmoment eliminiert und zu einem lineareren Verhalten führt. Darüber hinaus treten bei geschlitzten Motoren bei hoher Belastung Sättigungsprobleme auf.
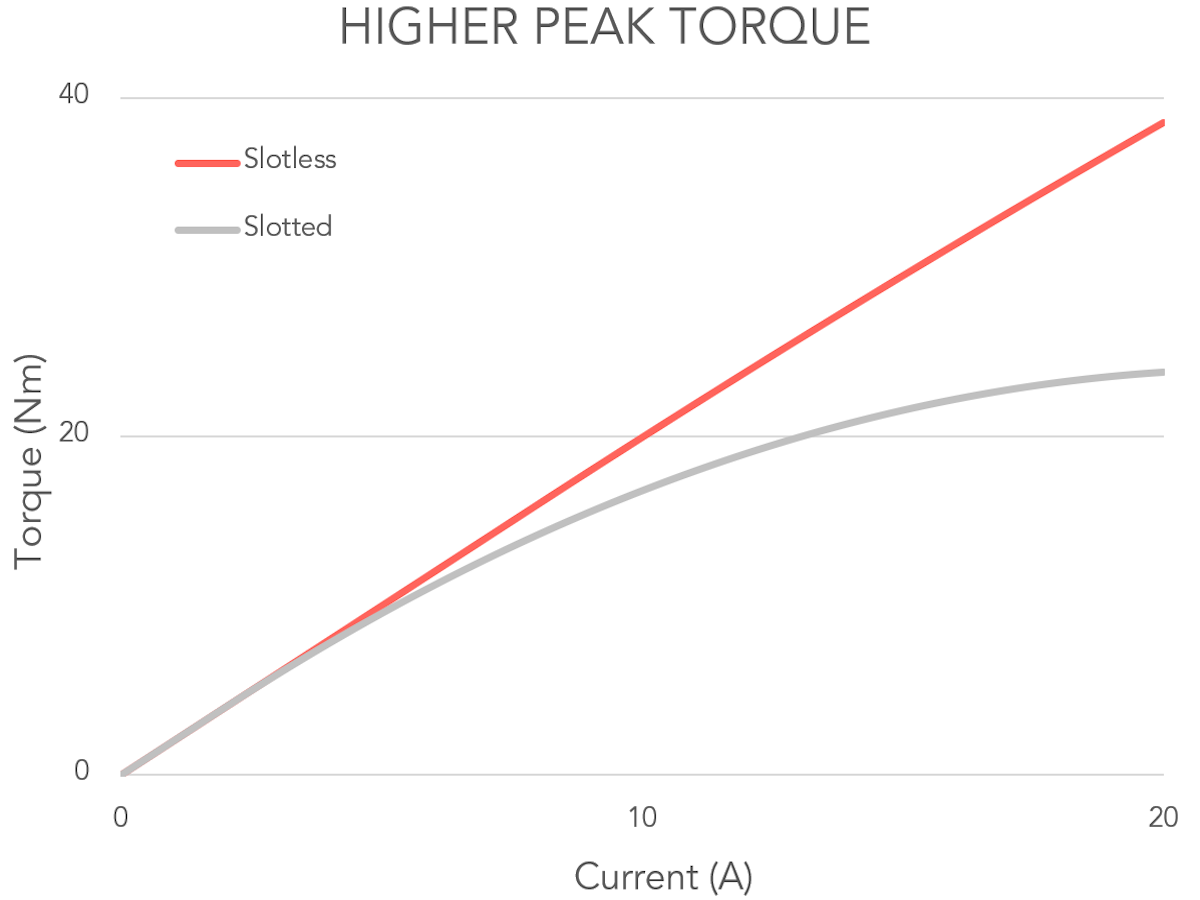
Was ist Drehmomentsättigung und warum ist sie ein Problem?
Roboter müssen präzise, stark und schnell sein. Herkömmliche Schlitzmotoren können bei starker Belastung überlastet werden, was zu erhöhten Verlusten und einem nicht linearen Verhältnis von Strom zu Drehmoment führt. Im Gegensatz dazu kommt es bei nicht geschlitzten Motoren (ohne Eisenzähne) nicht zu einer Sättigung. Dies führt zu einem lineareren Verhalten zwischen Strom und Drehmoment, was ein höheres Spitzendrehmoment und einen besseren Wirkungsgrad ermöglicht, insbesondere in dynamischen Anwendungen, die ein hohes Drehmoment über einen weiten Drehzahlbereich erfordern.
Weitere Informationen finden Sie unter: Nicht geschlitzte Motoren im Vergleich zu geschlitzten Motoren
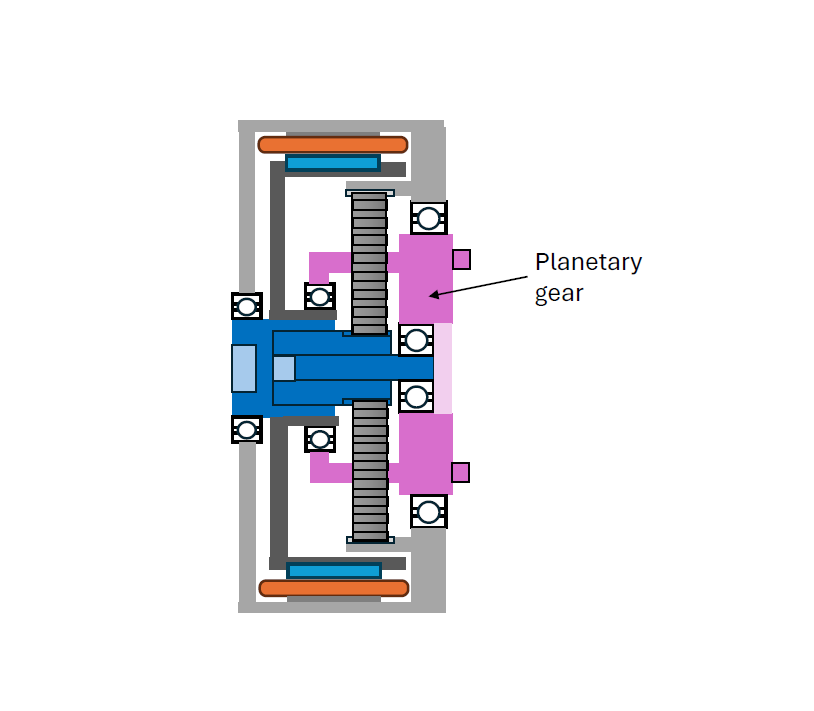
Optimale QDD-Robotergelenkarchitektur
Gelenke für die Leichtbaurobotik müssen kompakt sein. Deswegen hat die vom MIT eingeführte gemeinsame Architektur für den Mini-Gepard-Aktuator an Beliebtheit gewonnen. Diese Konstruktion verfügt über ein Getriebe, das sich in der Mitte des Motors befindet und erhebliche Größeneinsparungen bietet. Die Architektur basiert auf Außenläufermotoren, die über einen ausreichend großen Innendurchmesser verfügen, um in das Getriebe zu passen. Dies bringt jedoch aufgrund der physischen Anordnung von Stator und Rotor Herausforderungen in Bezug auf Kühlung und Montage mit sich. Die Konstruktion erfordert ein großes Gehäuse rund um den Rotor, um die Lager auf beiden Seiten des Aktuators abzustützen.
Ein Innenlaufmotor ist dagegen die bessere Wahl für diese Art von Aktuator. Es macht ein zusätzliches Gehäuse überflüssig und platziert den Stator an der Außenseite, wodurch die leitfähige Kühlfläche effektiv verdoppelt und die Wärmeableitung erheblich verbessert wird. In der Vergangenheit verfügten Innenmotoren jedoch nicht über einen ausreichend großen Innendurchmesser, um diese Anforderung zu erfüllen.
SlimTorq™-Motoren für leichte Robotik
Die nicht geschlitzten SlimTorq™-FiberPrinted-Motoren von Alva sind eine hervorragende Wahl für diese Anwendungen. Diese Motoren bieten eine marktführende konstante Motordichte und kombinieren eine hohe Drehmomentdichte mit verbesserter Effizienz. Der geometrisch einfache FiberPrint-Stator kann in Kombination mit dem Halbach-Array-Rotor so optimiert werden, dass er bei allen Drehmomentstufen und Temperaturen eine nahezu perfekte sinusförmige Gegen-EMK erzeugt. Dies führt zu praktisch keinem Rastmoment und einem höheren Spitzendrehmoment, wodurch das hochdynamische, lineare Strom-Drehmoment-Verhalten ermöglicht wird, das für ein qualitativ hochwertiges Robotergelenk erforderlich ist.
Dazu verfügen SlimTorq™-Motoren über das größte ID/OD-Verhältnis, was ein kompaktes Design ermöglicht, das im Gegensatz zu herkömmlichen Innenläufen Platz in der Mitte des Motors spart. Dies erleichtert die Integration einer Getriebelösung und reduziert die Gesamtfläche des Robotergelenks. Schließlich ermöglicht die flexible Faserdrucktechnologie die Skalierung der Motoren auf jede beliebige Größe, wodurch die Leistung für jedes einzelne Robotergelenkdesign optimiert wird. Um mehr über die SlimTorq™-Motoren von Alva und ihre Anwendungen in der Leichtbaurobotik zu erfahren, besuchen Sie Alva Industries.
Kontakt
Nicolas Giraudo
Kaufmännischer Leiter
Fossegrenda 1, 7038 Trondheim, Norwegen

Alle Rechte vorbehalten ©2025