Auswahl von Aktuatoren für chirurgische Robotergelenke
Erfahren Sie, wie die Wahl der richtigen Aktuatoren für chirurgische Robotergelenke die Präzision und Kontrolle bei komplexen Eingriffen verbessert. Erfahren Sie mehr über die Vorteile kompakter Torquemotoren und darüber, wie die FiberPrinting™-Technologie Größe, Leistung und Anpassung für die chirurgische Robotik der nächsten Generation optimiert.
November 10, 2024
.avif)
Die Roboterchirurgie wird immer beliebter, da sie es Chirurgen ermöglicht, komplexe Eingriffe mit mehr Präzision und Kontrolle durchzuführen, was zu einer Vielzahl von Vorteilen für die Patienten führt. Die anfängliche Skepsis gegenüber einem „Roboter, der mich operiert“, nimmt weiter ab, was zum Teil auf das Aufkommen anderer robotischer Lösungen in unserem täglichen Leben zurückzuführen ist, sei es ein Humanoid, der Ihnen in einer Bar ein Getränk serviert, oder ein mobiler Roboter, der Ihre Lebensmittel liefert.
Ein Schlüsselelement, das die Gesamtleistung und Leistungsfähigkeit des Operationsroboters beeinflusst, ist das Design und der Aufbau seiner Gelenke. Aufgrund unterschiedlicher Design-Prioritäten gibt es bei den meisten aktuellen Systemen auf dem Markt Abweichungen. Dies spiegelt sich in den technischen Spezifikationen und dem ästhetischen Design wider. Obwohl es diese Unterschiede gibt, gibt es einige Aspekte des Systems, die fast alle Hersteller zu verbessern versuchen, darunter Größe, Sicherheit, Geschwindigkeit und Stromverbrauch (Effizienz).
In diesem Artikel werden verschiedene Konstruktionsansätze für Robotergelenke und eine neue Technologie vorgestellt, die zunehmend von Herstellern chirurgischer Roboter eingesetzt wird.

Aktoren in Operationsrobotern
Es gibt verschiedene Arten von Betätigungstechnologien, die in chirurgischen Robotersystemen verwendet werden. Es gibt auch mehrere Unternehmen, die handelsübliche Aktuatoren mit festen Spezifikationen anbieten. Die Standardlösungen können für Roboterhersteller nützlich sein, die einen ersten Prototyp oder ein System der ersten Generation herstellen, da sie die Entwicklungszeit verkürzen können. Langfristig werden solche Lösungen jedoch in der Regel so konzipiert, dass die Hersteller einen höheren Integrationsgrad anstreben, um spezifischere Spezifikationen zu erfüllen, die auf die erforderliche Leistung und die Alleinstellungsmerkmale des Systems abgestimmt sind.
Was steckt in einem Robotergelenk?
Ein Robotergelenk besteht aus mehreren Komponenten, die eine kontrollierte Bewegung ermöglichen. Die Arten der Komponenten können variieren, umfassen aber in der Regel einen Motor, ein Getriebe bzw. eine Untersetzung in Form eines Getriebes, Encoder, Lager, eventuell Drehmomentsensoren, eine Bremse und einen Servoantrieb.
Dieser Artikel konzentriert sich auf die wichtigsten mechanischen Komponenten: Motor, Getriebe/Untersetzung und Bremse.
Zahnräder
In einem Robotergelenk werden Zahnräder hauptsächlich zur Drehmomentübertragung und zur Steuerung der Gelenkbewegung verwendet. Das Übersetzungsverhältnis bezieht sich auf das Verhältnis zwischen der Anzahl der Zähne zweier ineinandergreifender Zahnräder oder den relativen Drehzahlen zwischen diesen Zahnrädern. Es gibt an, in welchem Maße das Drehmoment eines Motors erhöht oder reduziert wird.
Das Übersetzungsverhältnis wird typischerweise als das Verhältnis zwischen der Anzahl der Zähne des angetriebenen Zahnrads (des Getriebes, das die Leistung erhält) und der Anzahl der Zähne des Antriebsrads (des Getriebes, das die Leistung liefert) ausgedrückt, oder es kann als das Verhältnis ihrer Drehzahlen dargestellt werden.
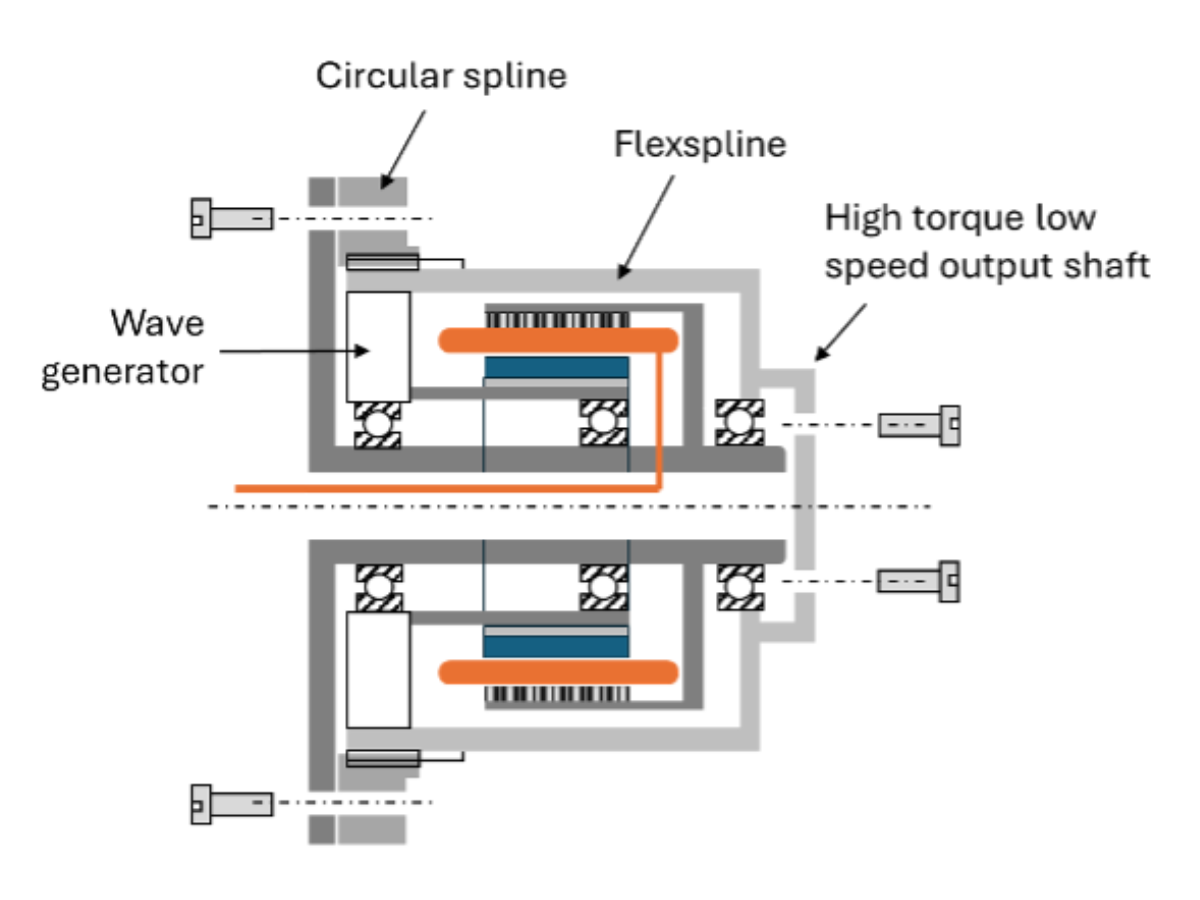
Für die Auswahl eines Getriebes für ein Robotergelenk stehen verschiedene Technologien zur Verfügung, und die Auswahl hängt von den gewünschten Spezifikationen für die Roboteranwendung ab. Robotiklösungen in der Chirurgie sind typischerweise serielle Kinematiken. Bei seriellen kinematischen Lösungen ist das benötigte Drehmoment in den größeren Achsen ziemlich hoch, weshalb die Übersetzungsverhältnisse in der Regel sehr hoch sind. Bei diesen Anwendungen werden typischerweise Dehnwellengetriebe verwendet.
Motoren
Einer der Faktoren, die die Gangwahl beeinflussen, ist die Art der im Gelenk verwendeten Motortechnologie. Die Dehnwellentechnologie wird am häufigsten verwendet, wenn gehäuselose Motoren als Antriebstechnologie verwendet werden. Diese Motortechnologie wird gewählt, wenn es auf Kompaktheit ankommt.
Bei Verwendung anderer Motortypen sind andere Getriebetechnologien besser geeignet, wie zum Beispiel die sehr verbreitete Integration von Schneckengetrieben mit BLDC-Motoren.
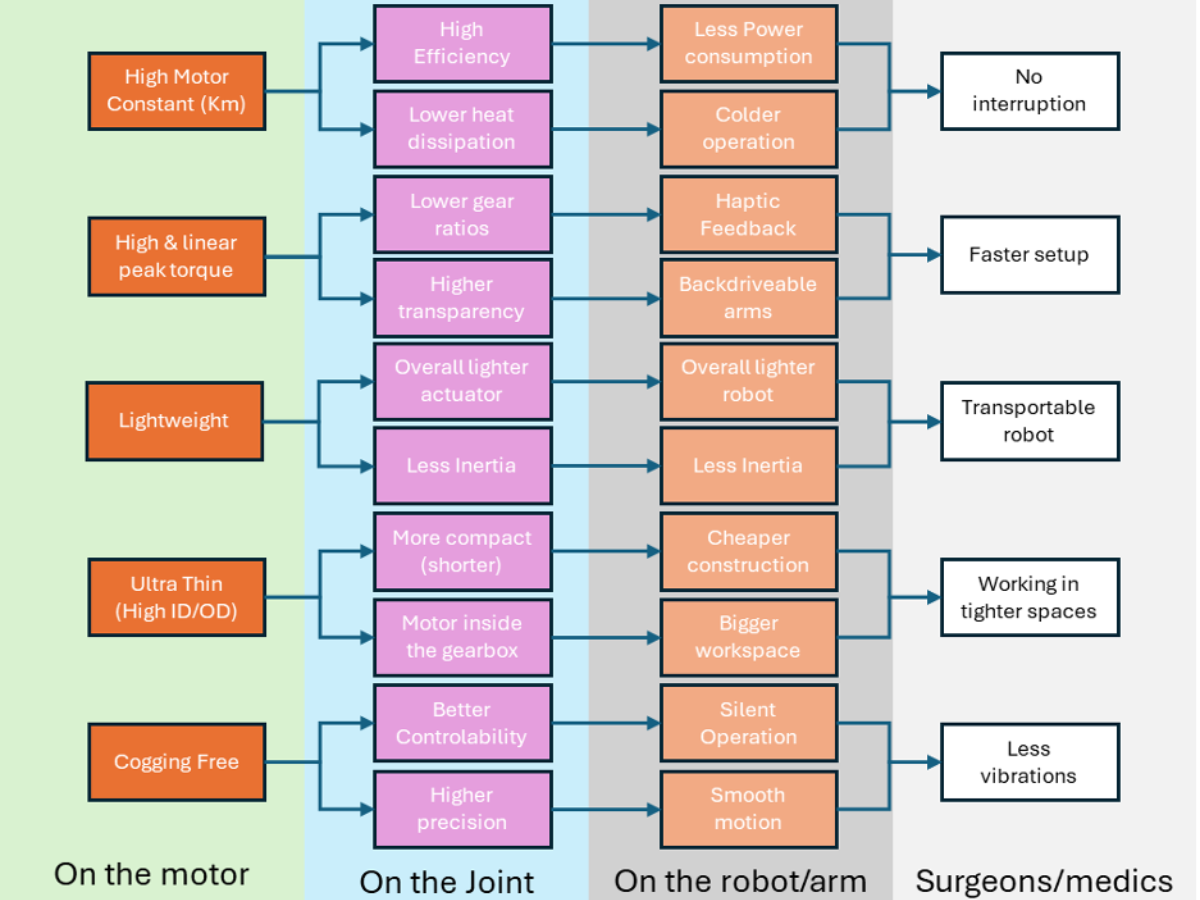
Rahmenlose Torquemotoren bieten viele Konstruktionsvorteile in Bezug auf Kompaktheit, Steuerbarkeit, Gewichtsreduzierung und Leistung. Torquemotoren können auch ein höheres Drehmoment als herkömmliche BLDC-Motoren bereitstellen, was ein niedrigeres Übersetzungsverhältnis oder in einigen Fällen auch gar kein Getriebe ermöglicht (siehe später). Je niedriger das Übersetzungsverhältnis ist, desto einfacher ist das Rückwärtsfahren. Außerdem verbessern sich der Wirkungsgrad, die Empfindlichkeit und die Transparenz (d. h. die Fähigkeit, das Drehmoment anhand des am Motor anliegenden Stroms zu messen).
Bremsen
Eine der Herausforderungen bei der Reduzierung des Übersetzungsverhältnisses hängt mit den Bremsen zusammen. Eine serielle Kinematik erfordert eine Bremse in fast allen Achsen, mit einigen Ausnahmen, wie z. B. den Endeffektoren oder Achsen, die sich nur horizontal bewegen (senkrecht zur Schwerkraft). Wenn das Übersetzungsverhältnis reduziert wird, müssten die Bremsen auch in der Lage sein, ein höheres Bremsmoment zu erzeugen, was je nach der in den Bremsen verwendeten Technologie auch größere Abmessungen und ein höheres Gewicht bedeuten könnte. Dies würde letztlich der angestrebten Gewichts- und Größenreduzierung von Motoren und Getrieben widersprechen oder ihr zuwiderlaufen.
Elektromagnetische Bremsen haben sich in den letzten Jahren jedoch verbessert, und sehr leichte Bremsen können jetzt ein hohes Bremsmoment bereitstellen und sind gleichzeitig skalierbar und anpassbar.
Einsatz von Direktantrieben in Operationsrobotern
Nicht für alle Achsen eines chirurgischen Robotergelenks sind Getriebeaktuatoren erforderlich. Ein Endeffektor oder das „Handgelenk“ können auch durch den Einsatz eines Torquemotors ohne Reduzierung gelöst werden. Eine Direktantriebslösung für diese Art von Anwendungen kann mehrere Vorteile in Bezug auf Größe und Gewicht, hohe dynamische Leistung und geringere Kosten bieten. Siehe Ein Leitfaden für Torquemotoren, um mehr hierzu zu erfahren.
Wenn Torquemotoren solche Vorteile bieten, könnte man sich fragen, warum Hersteller nicht einen ganzen Roboter ohne Getriebe konstruieren und nur Direktantriebe verwenden. Einige Parallelkinematiken haben gezeigt, dass dieses Design machbar ist. Für serielle Kinematiken ist diese Lösung jedoch ungewöhnlich, da ein solches System nicht robust wäre, was bei Systemen, die eine hohe Stabilität erfordern, ein Problem darstellt.
Präzisions-Torquemotoren mit FiberPrinted™-Technologie
Die Integration von Torquemotoren in einen Getriebeaktuator erfordert eine sorgfältige Überlegung. Ein wachsender Trend in der chirurgischen Robotikbranche und anderen Präzisionsanwendungen geht dahin, Präzisions-Torquemotoren zu verwenden, die mit der FiberPrinted™-Technologie hergestellt werden.
FiberPrinting™ ist ein industrielles Wickelverfahren, das das kontinuierliche Wickeln von Statormatten für eisenlose und nutenlose Motoren ermöglicht. Dieses Verfahren maximiert den Kupferfüllfaktor und ermöglicht eine präzise Anpassung von Größe und Statorkonfiguration, was zu einer optimalen Kombination aus Drehmomentdichte und Präzision in einem dünnen und leichten Formfaktor führt.
Diese ultradünnen Motoren ermöglichen eine vollständige Integration in ein Getriebe (Konzept in Abbildung 3 dargestellt) und ihr kernloses Design ermöglicht es den Torquemotoren auch, mit höheren Drehzahlen zu arbeiten.
Weitere Informationen finden Sie in diesem Artikel: Geschlitzte Motoren vs. nicht geschlitzte Motoren: Was ist der Unterschied?
.png)
Die Fähigkeit von FiberPrinting™, kompakte Lösungen zu integrieren, hat mehrere Vorteile, nicht nur für die Mechatronik-Designer, sondern auch für die Hersteller von Operationsrobotern und die Chirurgen der Endanwender. Wie in Abb. 3 unten dargestellt.

Alle Rechte vorbehalten ©2025