Outrunner- und Inrunner-Topologien erklärt: Drehmomenthebelwirkung, Trägheit und Systemgrenzen
Die Auswahl der optimalen bürstenlosen Motorarchitektur — Außenläufer oder Einläufer mit großen Durchgangslöchern — definiert die Systemgrenzen. Außenläufer maximieren den Luftspaltradius, um ein höheres statisches Drehmoment zu erzeugen, während Einläufer die Trägheit reduzieren und so für eine bessere dynamische Bandbreite und Wärmeableitung sorgen. In diesem Artikel werden die physikalischen Prinzipien und geometrischen Kompromisse analysiert, die bei der Auswahl von Motoren in der fortgeschrittenen Mechatronik maßgeblich sind.
March 17, 2026
.png)
Outrunner gegen. Inrunner: Körperliche Unterschiede
.png)
Bürstenlose Motoren werden in zwei verschiedene Designs eingeteilt: Einläufer und Außenläufer. Der entscheidende Unterschied besteht darin, dass sich das Außengehäuse eines Außenläufers um eine innere Struktur dreht. Selbst in integrierten mechatronischen Systemen, bei denen der Motor nicht sichtbar ist, bleibt dieser architektonische Unterschied grundlegend. Die Rotor- und Statorbaugruppen unterscheiden sich wie folgt:
Rotorbaugruppe:
- Die Magnete eines Außenläufers sind auf der Innenfläche des Rotors, einer dünnen äußeren rotierenden Schale oder „Dose“, angebracht. Bei dieser Konfiguration wird der Drehmomentradius maximiert, indem der aktive Luftspalt im maximalen Abstand vom Drehzentrum angeordnet wird. Da sich die Rotation auf den Außenumfang konzentriert, können Bauteile wie Hohlräder oder Riemenscheiben an der Außenschale des Motors befestigt werden.
- Einläufer verfügen über Magnete, die an einem inneren rotierenden Körper befestigt sind. Dadurch wird die Masse in der Nähe der Rotationsachse konzentriert und der effektive Luftspaltradius verringert. Dieser reduzierte Radius minimiert die Rotationsträgheit und ermöglicht kleinere Lager, wodurch die Drehdynamik deutlich verbessert wird. Diese Topologie ist ideal für herkömmliche wellenbetriebene Verbindungen.
Statorbaugruppe: - Der Stator eines Außenläufers ist ein stationärer elektromagnetischer Kern, der auf einer zentralen Struktur montiert ist.
- Der Stator eines Einläufers ist ein stationäres elektromagnetisches Element, das im äußeren zylindrischen Gehäuse montiert ist.

Elektromagnetische Unterschiede und radiusabhängige Hebelwirkung: ein überragender Vorteil
Aus elektromagnetischer Sicht wird das Motordrehmoment durch das Zusammenspiel von Luftspaltradius, aktiver axialer Länge und elektromagnetischer Scherspannung bestimmt. Diese Beziehung ist beim Vergleich der Architektur von entscheidender Bedeutung, da die geometrische Skalierung die Drehmomentdichte, den Wirkungsgrad und die Dauerleistung direkt bestimmt. Das maßgebliche Verhältnis zwischen Drehmoment und Drehmoment ist:
Drehmoment T = 2 μ·σs·r²·l (Nm)
wo:
r ist der effektive Luftspaltradius (m)
L ist die aktive axiale Länge (m)
σs ist die elektromagnetische Scherspannung (N/m²)
Da das Drehmoment proportional zum Quadrat des Radius ist (T ∝ r²), führen selbst geringfügige Erhöhungen des Luftspaltdurchmessers zu erheblichen Verbesserungen des mechanischen Vorteils. Das Hauptunterscheidungsmerkmal ist die geometrische Hebelwirkung:
- Ein Vorreiter nutzt den maximal verfügbaren Radius innerhalb eines bestimmten Außendurchmessers (OD), um die Drehmomentstütze zu maximieren. Dadurch wird eine höhere Drehmomentkonstante (Kt) pro Stromeinheit erreicht, wodurch die ohmschen Verluste reduziert werden, die zur Aufrechterhaltung einer statischen Halteposition erforderlich sind.
- Im Gegensatz dazu ist der Einläufer besitzt von Natur aus eine kleinere Drehmomentstütze, da die Magnete näher an der Mitte sitzen. Um das gleiche Ausgangsdrehmoment zu erreichen, muss der Motor entweder die axiale Länge vergrößern oder mit mehr Strom betrieben werden. Bei Motorkonstruktionen mit begrenztem Platzangebot oder dünnen Abmessungen führt dies zu einer höheren elektrischen Belastung und Wärme, was häufig zu einer thermischen Begrenzung führt.
Elektromotorische Gegenkraft (Back-EMF):
- Outrunner ermöglichen höhere Magnetpolzahlen und eine höhere Gegen-EMF pro Umdrehung, was zu einer größeren Spannungskonstante (Ke in V/krpm) führt. Dieses Phänomen ist direkt auf den größeren Durchmesser des Außenläufers zurückzuführen. Daher werden Ausläufer mit hohem Ke-Wert häufig in Direktantriebsszenarien eingesetzt, um diesen inhärenten Vorteil zu nutzen.
- Einsteiger, innerhalb einer standardisierten Größenklasse, weisen typischerweise eine kleinere Spannungskonstante Ke auf. Diese Konfigurationen sind häufig für den Betrieb mit höheren Geschwindigkeiten optimiert und können mit einer Ganguntersetzung kombiniert werden, wenn eine Drehmomentvervielfachung auf Anwendungsebene gewünscht wird.
Trägheit und dynamische Reaktion: Ein Vorteil für Inrunner
Das Drehmoment allein bestimmt nicht die dynamische Bewegungsleistung. Die Rotationsträgheit (J) gibt den Widerstand eines Körpers gegen Änderungen der Winkelgeschwindigkeit an. Bei einer höheren Trägheit ist ein höheres Drehmoment zum Beschleunigen oder Abbremsen erforderlich, wodurch die Reaktionsfähigkeit des Systems von Natur aus verlangsamt wird. Die Winkelbeschleunigung (α) bestimmt die dynamische Systembandbreite und Reaktionszeit.
Rotationsträgheit: J ∝ m·r² (kg·m²)
Winkelbeschleunigung: α = T/J (rad/s²)
wo:
m ist die Rotormasse (kg)
r ist der effektive Luftspaltradius (m)
Bei allen Radialflussmotoren skaliert das Drehmoment mit dem Quadrat des Luftspaltradius (T ∝ r²). Während Außenläufer aufgrund ihres großen Radius eine überragende statische Drehmomenthebelwirkung bieten, beeinträchtigt die geometrische Realität, bei der die Masse weit von der Rotationsachse entfernt ist, ihr dynamisches Reaktionsvermögen erheblich. Da unterschiedliche Motortopologien für einen bestimmten Motorfußabdruck sehr unterschiedliche physikalische Abmessungen und Materialien vorschreiben, muss bei einem direkten Vergleich genau untersucht werden, wie die Winkelbeschleunigung mit der Größe skaliert.
- Outrunner: Bei gegebenem Platzbedarf maximieren Außenläufer die Hebelwirkung des Drehmoments durch einen großen effektiven Luftspaltradius, aber sie sind auf ein schweres Bügeleisen angewiesen. Diese Gehäusemasse (m), vereinfacht als dünne Schale, skaliert linear mit ihrem Umfang (m ∝ r), wodurch die Rotationsträgheit auf die dritte Potenz (J ∝ r³) skaliert wird. Daher skaliert die Winkelbeschleunigung umgekehrt zum Radius (α ∝ 1/r). Diese massive absolute Trägheit verringert die Winkelbeschleunigung des Systems, wodurch Außenläufer für dynamische Bewegungen mit hoher Frequenz weniger geeignet sind.
- Eingeschlitzte Kufen: Der Rotor dreht sich zentral und wird durch die umgebenden sperrigen Statorzähne auf einen viel kleineren absoluten Durchmesser begrenzt. Da diese Rotoren einen festen Stahlkern benötigen, um den Magnetfluss zu übertragen, sind sie nicht als dünne Schalen modelliert; ihre Masse skaliert quadratisch (m ∝ r²), und ihre Rotationsträgheit skaliert steil bis zur vierten Potenz (J ∝ r³). Folglich skaliert die Beschleunigung umgekehrt zum Quadrat des Radius (α ∝ 1/r²). Trotz dieser erheblichen Skalierungseinbußen konzentriert ein Anlaufläufer seine Masse so viel näher an der Rotationsachse, dass die drastische Verringerung der absoluten Trägheit die Verringerung der Drehmomentstütze bei weitem überwiegt. Dies führt zu deutlich schnelleren Reaktionszeiten und einer höheren Bandbreite im geschlossenen Regelkreis, wodurch die Dynamik dem statischen Drehmoment vorgezogen wird.
- Einläufer ohne Steckplatz: (Wie bei SlimTorq™ von Alva) werden sperrige Statorzähne vermieden, sodass sich der Innenrotor näher an den Außendurchmesser des Motors ausdehnen kann, um die magnetische Hebelwirkung wie bei einem Außenläufer zu erfassen. Darüber hinaus macht eine selbstabschirmende Halbach-Anordnung ein schweres Rückführjoch aus Stahl überflüssig, sodass eine ultraleichte Rotorhülse aus Aluminium verwendet werden kann. Bei dieser Topologie wird die günstige dünnschalige Skalierung beibehalten (J ∝ r³, α ∝ 1/r), die absolute Basismasse (m) wird jedoch drastisch reduziert. Die Massenreduzierung dominiert das Verhältnis 1/r, was zu einem hohen T/J-Verhältnis führt, was zu einem hohen Drehmoment und einer hohen Winkelbeschleunigung führt.
Wärmemanagement: ein Vorteil für Einsteiger
Das kontinuierliche Motordrehmoment wird grundsätzlich durch die Wärmeableitung des Stators begrenzt. Sichere Wicklungsisolationstemperaturen und Magnetstabilität bestimmen die zulässige Strom- und Drehmomentabgabe. Bei Maschinen mit Schlitzen ist das maximale Drehmoment aufgrund der magnetischen Sättigung der Statorzähne begrenzt. Bei Konstruktionen ohne Nut, bei denen die Sättigung vernachlässigbar ist, profitiert das transiente Spitzendrehmoment direkt von einer verbesserten Kühlung auf Anwendungsebene.
Thermischer Widerstand: Rth ∝ 1/(reff·L)
wo:
reff ist der Radius der wärmeableitenden Oberfläche (mm)
L ist die aktive axiale Länge (mm)
Unter der Annahme einer oberflächenbegrenzten Kühlung ist der Wärmewiderstand eines Motors gegenüber der Umgebung (Rth, gemessen in °C/W) skaliert umgekehrt zu seiner wärmeabweisenden Oberfläche (R)th ∝ 1/(reff·L). Da die Wärmeableitungskapazität linear mit diesem Radius skaliert, schreibt die Architektur eine kontinuierliche Leistung vor.
Wärmemanagement:
- Einläufer Die Architektur eignet sich hervorragend für hohe Dauerdrehmomente, da Wärmeenergie radial nach außen abgestoßen wird. Da der Stator — die primäre Wärmequelle — mit dem Außengehäuse verbunden ist, wird die Energie effizient durch Ableitung an die Umgebung oder durch Flüssigkeitskühlung abgeleitet.
- Outrunner speichern stattdessen die Wärme in einem stationären Kern und bilden so eine „thermische Insel“. Dies erfordert eine komplexe Kühlung oder eine starke Drehmomentreduzierung, um ein Versagen der Isolierung zu verhindern. Darüber hinaus kann die in die kleine Welle und die Lager geleitete Wärme die Schmierung und die mechanische Zuverlässigkeit beeinträchtigen.
Mechanische Integration und Systemeinschränkungen
Rahmenlose Architekturen optimieren das Systemdesign und bieten die Freiheit, Rotation, Drehmomentübertragung und Kraftfluss durch integrierte Komponenten zu definieren.
Durchgangsloch-Fähigkeit:
Historisch gesehen Außenläufer wurden für große Öffnungen bevorzugt, da ihr Drehmomentradius unabhängig von der Durchgangsöffnung ist. Umgekehrt wird ein Schlitz erweitert Inrunner Das Durchgangsloch reduziert den Platz für Statorzähne und Wicklungen, was zu erheblichen Drehmomenteinbußen führt. Die schlitzlose FiberPrinting™ -Technologie definiert dieses Paradigma neu: Durch den Verzicht auf Eisenzähne und einen Kupferfüllfaktor von bis zu 60% erreichen die SlimTorq™ -Motoren ein ID/OD-Verhältnis von bis zu 86,2%. Dies ermöglicht die zentrale Verlegung von Schleifringen, Optik und Verkabelung ohne die Leistungs- oder Temperatureinbußen herkömmlicher Designs.
Blendeneffizienz: SlimTorq™ Lite-Serie
Die folgenden Daten belegen die Aperturfähigkeit des gesamten SlimTorq™ Lite (L) -Portfolios:

Lagerintegration und Lastpfade:
Traditionell Einsteiger Verwenden Sie Zentrallager, um lineare Geschwindigkeiten zu minimieren. Motoren ohne Schlitze mit großer Apertur — sowohl im Einlauf als auch Vorreiter - kann Lager mit dünnem Querschnitt mit großem Durchmesser verwenden, um eine hervorragende Momentenbelastung zu gewährleisten. Bei Triebwerken mit Felgenantrieb ein Einlauf Ein Rotor mit einem ausreichend großen Durchgangsloch kann direkt an der Propellerfelge befestigt werden. Dadurch wird die zentrale Welle entfernt und der Luftwiderstand reduziert, während gleichzeitig die der Architektur innewohnenden thermischen Vorteile genutzt werden.
Umweltschutz:
- Einläufer Die Architektur unterstützt natürlich geschlossene Konstruktionen, bei denen eine stationäre Außenhülle den Luftspalt vor Verunreinigungen wie Feuchtigkeit oder Partikeln schützt. Das Hinzufügen abgeschirmter Lager erhöht den Schutz zusätzlich.
- Outrunner bleiben oft offen, um die Kühlung des Stators zu erleichtern, wodurch der Luftspalt dem Eindringen von Partikeln und der Zersetzung ausgesetzt ist. Sekundärdichtungen mit großem Durchmesser können zwar hinzugefügt werden, sie erhöhen jedoch die Reibung und verringern den Wirkungsgrad.
.png)
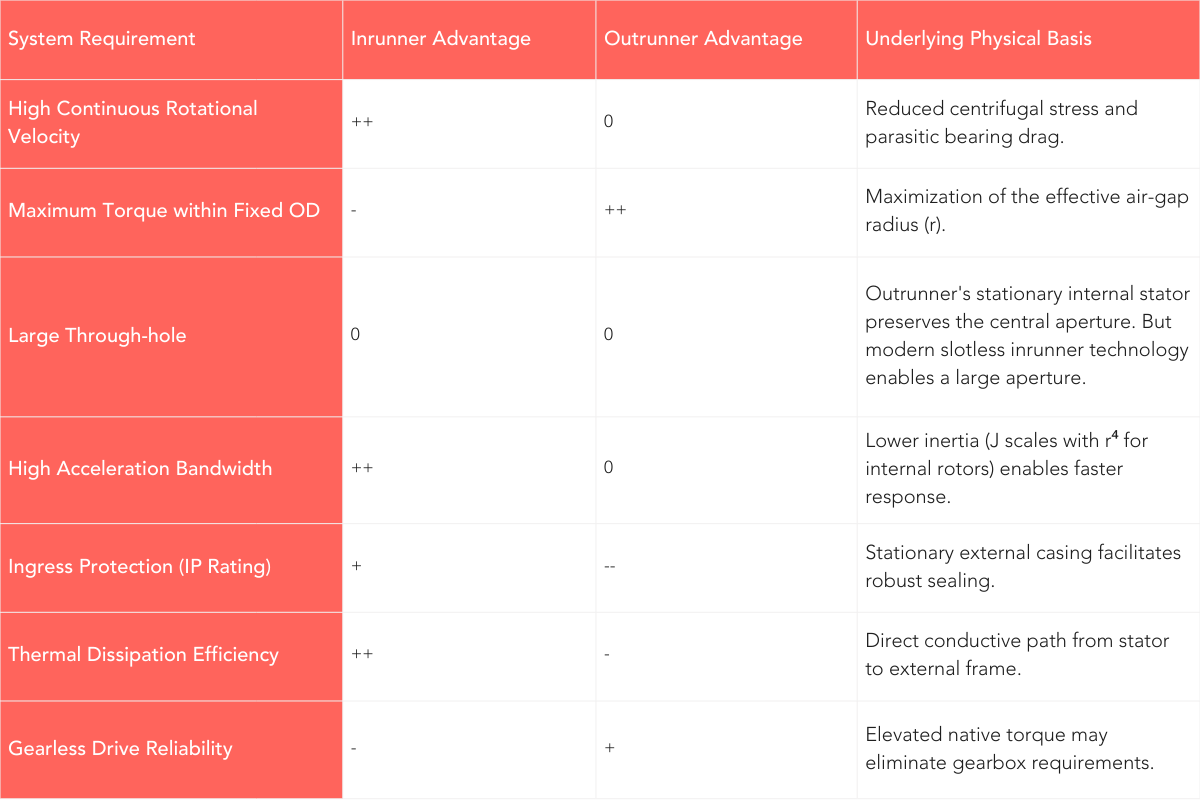
Architektonische Auswahlmatrix
Eine geeignete Architekturauswahl kann auf priorisierten Systemanforderungen basieren:
Slotless Inrunner-Implementierung
In der Vergangenheit opferten die Inrunner der dynamischen Reaktion die Hebelwirkung des Drehmoments, aber moderne Designs ohne Schlitze machen diesen Kompromiss durch die Optimierung von Stator und Rotor zunichte. Der Ersatz eines geschlitzten Stators aus Eisen durch einen nicht schiefen FiberPrinted™ -Stator mit hoher Dichte erhöht den effektiven Luftspaltradius (r) innerhalb derselben Hüllkurve. Dadurch wird die Drehmomentstütze erweitert, um die Hebelwirkung zu verbessern und gleichzeitig ein niedriges Trägheitsmoment und eine effiziente Wärmeableitung aufrechtzuerhalten. Darüber hinaus erhöhen Halbach-Rotoren die Flussdichte, ohne dass sich eine starke Rückschicht im Rotor bildet, wodurch die magnetische Ausnutzung verbessert und gleichzeitig Masse und Trägheit weiter reduziert werden.
Fazit
Die Unterschiede zwischen Outrunner und Inrunner wurden durch radiusabhängige Beschränkungen erklärt. Die Wahl, einen Typ zu verwenden, aktiviert oder schränkt ein Bewegungssteuerungssystem ein.
- Outrunner Lösungen eignen sich am besten für hohe statische Drehmomente. Wenn der Motor auch als tragendes Bauteil dienen kann, können diese Anforderungen gut erfüllt werden.
- Einläufer Die Lösungen sind ideal für Systeme, die für Geschwindigkeit und dynamisches Verhalten optimiert sind. Sie bieten ein hervorragendes Wärmemanagement und hochfrequente Bewegungsfunktionen, die für eine schnelle Positionierung und Stabilisierung erforderlich sind.
Diese Unterschiede werden durch die Weiterentwicklung der nutenlosen Innenläufer-Torquemotoren verringert, die nicht die dynamischen oder thermischen Einschränkungen von Außenläufern aufweisen.
Die Bewertung realer Systeme erfordert die Berücksichtigung anwendungsspezifischer Kompromisse, die über die grundlegende Topologie hinausgehen. In den Whitepapers, auf die verwiesen wird, werden diese im Kontext analysiert, einschließlich der thermischen Beschränkungen bei QDD-Aktuatoren, der Sättigung bei Schlitzmaschinen und der großen Vorteile von Durchgangsbohrungen. Durch die Integration elektromagnetischer, mechanischer und thermischer Faktoren definieren diese Dokumente die tatsächliche Leistung und die Betriebskosten eines Systems.
---
Referenzen
Alva Industries A/S. (2025). *Slim2Real: Mit SlimTorq™ betriebene KI-Aktuatoren und Überlegungen zum Design von QDD-Aktuatoren*. Trondheim, Norwegen: Alva Industries A/S.
Alva Industries A/S. (2025). *Großer Durchgangslochdurchmesser: Integrationsvorteile in der Prothetik und Robotik*. Trondheim, Norwegen: Alva Industries A/S.
Alva Industries A/S. (2025). *Technische Ineffizienzen und Gesamtbetriebskosten bei Präzisions-Kardanrägern*. Trondheim, Norwegen: Alva Industries A/S.

Alle Rechte vorbehalten ©2025