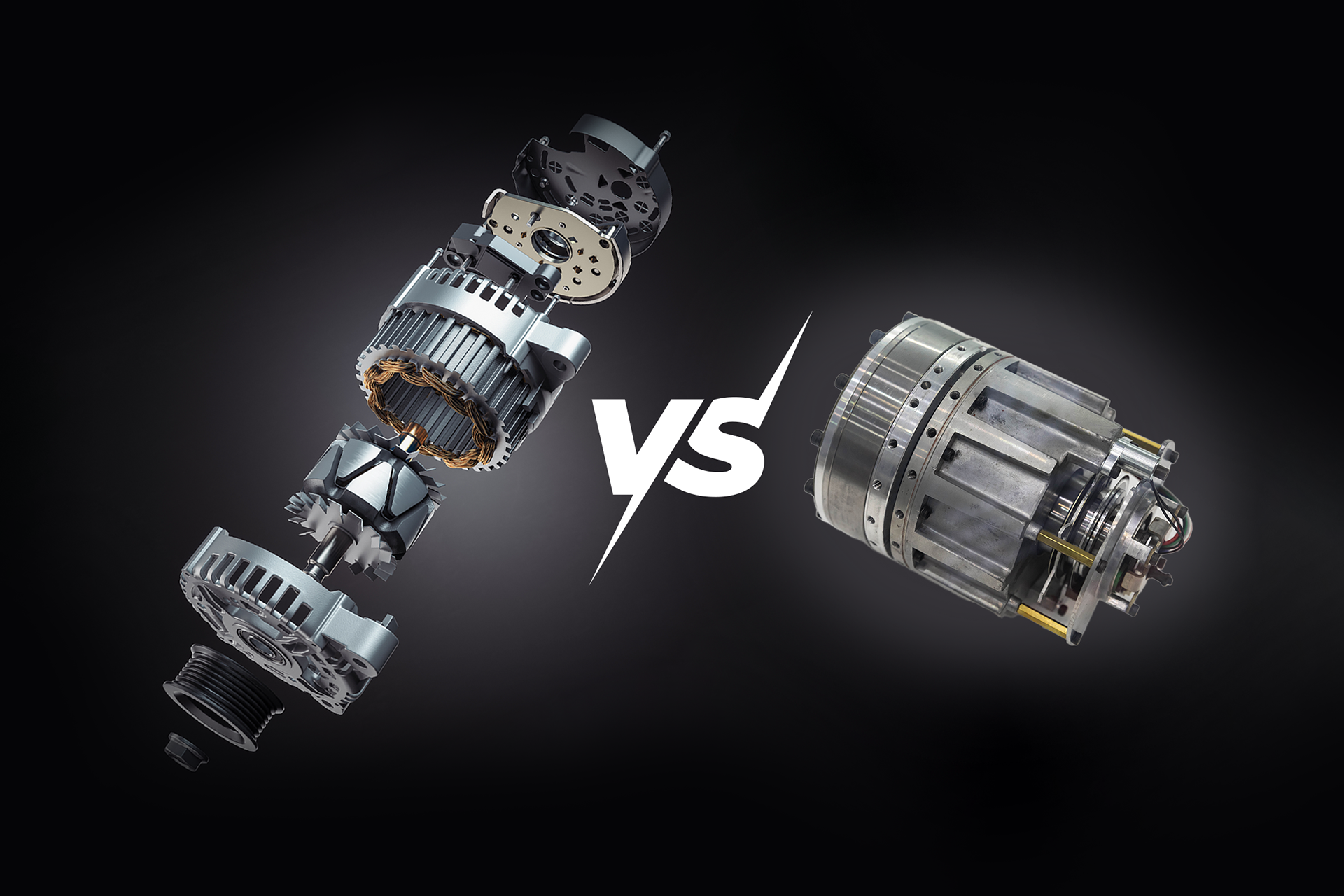
Direct drive vs. attuatori con riduttore
La domanda “Qual è migliore: un attuatore direct-drive o un attuatore con riduttore?” non ha una risposta universale: dipende dall’applicazione. Tutti i sistemi motore devono erogare coppia e velocità di rotazione, ma i requisiti specifici variano ampiamente. Alcune applicazioni richiedono un’uscita a bassa velocità con un controllo dinamico preciso e di alto livello, mentre altre richiedono la massima coppia nel minimo ingombro. In questo articolo analizziamo i fattori chiave per aiutarti a scegliere l’attuatore giusto per le tue esigenze.
August 14, 2025
Direct drive per un azionamento dinamico & preciso
Vantaggi:
- Nessun gioco (backlash)
- Nessun attrito
- Bassa inerzia
- Coppia di cogging da bassa a quasi nulla
- Nessun problema di cedevolezza
- Elevata retroazionabilità
- Alta risoluzione meccanica
- Alta affidabilità
- Manutenzione da bassa a nulla
- Nessuna lubrificazione necessaria per l’azionamento
- Linearità nel tempo
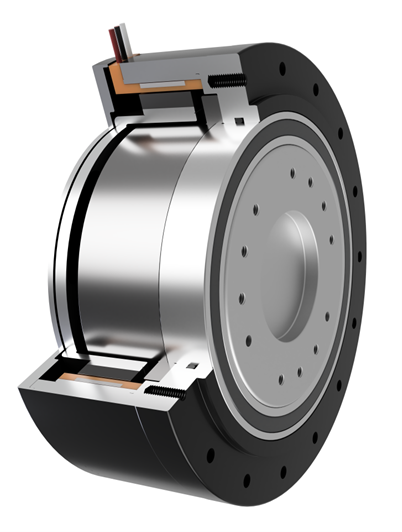
I motori direct drive sono ideali per applicazioni che richiedono buon controllo e dinamica. La Figure 1 mostra un esempio di versione con carcassa, e la Figure 2 mostra esempi di motori direct drive frameless. Non presentano gioco (backlash), né attrito meccanico, praticamente nessuna cedevolezza (molto rigidi) e bassa inerzia. Tutti questi attributi migliorano la capacità di controllare la posizione del motore in modo rapido e affidabile.

Il gioco (backlash) negli attuatori con riduttore riduce di fatto la capacità di posizionare il motore con elevata accuratezza; anche con un encoder in uscita l’accuratezza di posizionamento sarà limitata e le prestazioni dinamiche saranno inferiori. Solo i veri attuatori direct drive hanno gioco nullo: i “zero backlash gearboxes” mostrano comunque backlash sotto forma di isteresi.
.png)
L’attrito meccanico e, in particolare, l’attrito statico (stiction) introducono non linearità nel sistema, complicando la taratura del controllo e riducendo le prestazioni dinamiche. L’attrito meccanico è particolarmente dannoso per applicazioni di stabilizzazione, in cui l’inerzia del sistema viene utilizzata per filtrare disturbi ad alta frequenza, ad esempio nell’optronica aerotrasportata.
La cedevolezza in un sistema di azionamento che richiede un buon controllo di posizione crea criticità. La cedevolezza si comporta come un elemento elastico, o, peggio ancora, plastico, che trasferisce il carico. Questo genera un angolo relativo tra motore e carico utile dipendente dalla coppia in uscita e rende il sistema non deterministico, poiché non è possibile modellarlo perfettamente. Di conseguenza, compromette la capacità di tarare il controllo di posizione in modo ottimale.
Minimizzare l’inerzia del sistema è della massima importanza, per via della relazione lineare tra coppia e accelerazione rotazionale. Una riduzione dell’inerzia ha un impatto lineare diretto sulla coppia richiesta e, di conseguenza, su dimensioni e peso del motore e sul consumo di potenza per l’azionamento.
Applicazioni direct drive
I direct drive sono ottimali per applicazioni in cui il controllo fine e rapido di posizione e coppia è della massima importanza. Esempi tipici sono gimbal, sistemi di feedback di forza e macchine di metrologia.
Gimbal e sistemi optronici
I gimbal richiedono un posizionamento preciso, ripetibile e rapido sotto carichi dinamici variabili.
Tipicamente, questi sistemi supportano una camera, un laser o un altro elemento optronico che deve individuare oggetti e raccogliere informazioni con alta precisione su lunghe distanze. Anche un piccolo gioco (backlash) in un sistema con riduttore o la coppia di cogging dei Motori con alloggiamenti influisce in modo marcato sulla precisione.
Questi sistemi sono inoltre spesso montati su velivoli e altri veicoli in movimento, aumentando la necessità di posizionamento rapido e altamente dinamico e di stabilizzazione contro forze esterne imprevedibili.
Sistemi di feedback di forza
I sistemi di feedback di forza richiedono risposte realistiche, che devono essere sia rapide sia accurate. Le applicazioni in questo ambito possono includere diversi tipi di simulatori, sistemi di chirurgia robotica, applicazioni di realtà virtuale o varie tipologie di robot di teleoperazione, per esempio. In generale, tutte queste applicazioni devono fornire all’operatore un senso del tatto o emulare uno scenario reale. Per migliorare questo comportamento, la forza o il movimento generati devono avvenire istantaneamente e con la corretta precisione. Per questo motivo, sono preferibili soluzioni direct drive, poiché eliminano fenomeni potenzialmente problematici come backlash, attrito, inerzia aumentata e cogging del riduttore.
Macchine di metrologia
Le macchine di metrologia richiedono profili di moto ad alta precisione, ripetibili e fluidi. Più sono precise e stabili, meglio è. Applicazioni tipiche come macchine di misura a coordinate, tavole rotanti e scanner laser tendono a usare direct drive per eliminare il backlash e altri problemi introdotti dagli ingranaggi. Inoltre, un direct drive offre prestazioni migliori grazie alla minimizzazione dei componenti rotanti e alla riduzione della lunghezza del sistema che il motore deve mettere in rotazione.
Azionamento con riduttore per coppia & compattezza
Sulla base dei vantaggi degli attuatori direct drive, si potrebbe pensare che possano essere utilizzati per tutte le applicazioni. Tuttavia, l’azionamento direct drive ha alcuni limiti, che lo rendono inadatto ad altri casi d’uso, principalmente quando la coppia in uscita richiesta in uno spazio compatto è molto elevata. Molte applicazioni richiedono livelli di coppia che superano di gran lunga le capacità degli attuatori direct drive oppure, quando i budget sono limitati. Quando la coppia in uscita è l’aspetto più importante, le soluzioni con riduttore sono la scelta migliore e, in generale, esistono due opzioni principali: attuatori a basso rapporto di riduzione e attuatori ad alto rapporto di riduzione. La soluzione più adatta dipende da diversi altri fattori. La sezione seguente ne affronta alcuni.
Attuatori a basso rapporto di riduzione, attuatori QDD
Vantaggi:
- Retroazionabilità
- Basso attrito
- Elevata coppia in uscita
- Velocità più elevate
- Reazione dinamica
- Maggiore efficienza
Gli attuatori equipaggiati con riduttori a basso attrito e ad alta retroazionabilità, con rapporti di riduzione fino a 20:1, vengono talvolta chiamati attuatori Quasi Direct Drive (QDD). Si chiamano QDD perché imitano, in una certa misura, le proprietà dei motori direct drive. Gli attuatori QDD sono simili ai veri attuatori direct drive nel senso che presentano attrito relativamente basso, elevata retroazionabilità e bassa inerzia rispetto ad attuatori dotati di riduttori con alti rapporti di riduzione.
Il basso rapporto di riduzione consente agli attuatori QDD di mantenere molti dei vantaggi di un attuatore direct drive e, inoltre, di avere una coppia in uscita notevolmente migliorata. La coppia in uscita, rispetto a un attuatore direct drive, aumenta in modo praticamente lineare con il rapporto di riduzione di un attuatore QDD. Il risultato è un attuatore molto potente con prestazioni dinamiche sufficienti per molte applicazioni. La capacità di raggiungere in modo preciso e rapido un obiettivo di posizione si riduce, ma questo può essere accettabile per la maggior parte delle applicazioni. La Figure 3 mostra un esempio di tale attuatore con un riduttore integrato all’interno del motore.
Una retroazionabilità sostenuta e un’inerzia relativamente bassa sono cruciali per applicazioni che interagiscono con ambienti imprevedibili. Ad esempio, nelle applicazioni di robotica con gambe, la gamba interagisce con superfici irregolari e deve essere in grado di smorzare collisioni improvvise, cosa possibile solo con elevata retroazionabilità e bassa inerzia riflessa.
Applicazioni a basso rapporto di riduzione
Le applicazioni a basso rapporto di riduzione includono sistemi in cui è richiesta una coppia più elevata e si può tollerare una minore precisione. Tipicamente, questo può significare applicazioni in cui è richiesta la coppia massima, ma la retroazionabilità deve comunque essere considerata. Ad esempio: robotica umanoide e quadrupede, esoscheletri e robot delta.
Robotica umanoide & quadrupede
Questi robot hanno casi di carico molto dinamici. Richiedono attuatori compatti e leggeri, elevate coppie di mantenimento, risposte rapide e alte coppie di picco. Devono inoltre essere retroazionabili, sia per la sicurezza in determinati ambienti sia per adattarsi a forze esterne improvvise. La soluzione consiste di solito nel trovare un attuatore ottimale e compatto, con un basso rapporto di riduzione, in grado di gestire diversi punti operativi di coppia e velocità.
Esoscheletri
Gli esoscheletri vengono indossati sul corpo umano. Devono quindi essere compatti, leggeri, retroazionabili e, naturalmente, sufficientemente robusti per aiutare adeguatamente nello svolgimento del lavoro. Un attuatore a basso rapporto di riduzione è ottimo per questa combinazione di attributi. L’attuatore deve fornire coppia e velocità sufficienti quando necessario, ma deve anche adattarsi rapidamente alle forze esterne generate, soprattutto se si tratta di un sistema di assistenza.
Robot delta
Un robot delta deve essere robusto, veloce e preciso: uno scenario di compromesso adatto a un attuatore QDD. I robot devono avere alta reattività, elevata banda di controllo e continuare a eseguire operazioni ad alta accuratezza. L’attuatore a basso rapporto di riduzione consente una reattività ragionevolmente elevata, con capacità di coppia aumentate.
Attuatori ad alto rapporto di riduzione
Vantaggi:
- Massima coppia in uscita
- Coppia di mantenimento (nessuna potenza necessaria)
- Alta precisione
- Basso gioco (backlash)
A volte la necessità di livelli elevati di coppia supera di gran lunga il potenziale dei direct drive e persino degli attuatori QDD. In questi casi, un attuatore ad alto rapporto di riduzione è la soluzione corretta. L’elevato rapporto di riduzione consente livelli di coppia estremamente alti, ben oltre direct drive e attuatori QDD, a partire da attuatori compatti. Tuttavia, l’elevata coppia in uscita può introdurre alcuni svantaggi. L’alto rapporto di riduzione aumenta drasticamente l’attrito, che di fatto riduce la retroazionabilità a zero e incrementa massicciamente l’inerzia riflessa, rendendo il sistema incapace di smorzare forze esterne. La mancanza di retroazionabilità può anche essere un vantaggio, ad esempio in applicazioni che richiedono un’elevata coppia statica di mantenimento. Un attuatore di questo tipo può essere estremamente compatto, come mostrato nello schizzo in Figure 4, dove il motore è integrato all’interno del riduttore ad alto rapporto di riduzione.

Applicazioni ad alto rapporto di riduzione
Per le applicazioni ad alto rapporto di riduzione, l’obiettivo è ottenere una coppia sufficientemente elevata, entro un budget fisso di spazio o peso. Tipicamente, questi sistemi si concentrano su punti operativi a bassa velocità e non richiedono che le articolazioni siano altamente retroazionabili. Questo include robot industriali, robotica medicale e azionamenti di macchinari in diversi settori.
Bracci robotici industriali
I bracci robotici eseguono movimenti con carichi elevati, con velocità e precisione sufficienti. Il peso del carico utile è di solito l’aspetto più importante, mentre velocità e precisione sono secondari. Questi attuatori robotici ad alta riduzione, posizionati nelle articolazioni, devono gestire carichi elevati mantenendo dimensioni compatte; per questo, motori di piccole dimensioni vengono accoppiati a una trasmissione ad alto rapporto di riduzione.
Cobot
I cobot sono simili ai bracci robotici, ma operano in ambienti insieme alle persone, o anche con il contributo dei movimenti umani. Il compito può essere assistere in un’operazione con carichi elevati, oppure semplicemente svolgere un’operazione lavorativa nello stesso ambiente di lavoro delle persone. Anche se un’articolazione retroazionabile sarebbe utile, in genere la capacità di gestire il carico è considerata più importante e la velocità del sistema viene ridotta per adottare un progetto più sicuro.

Tutti i diritti riservati ©2025