Scegliere il motore giusto nelle applicazioni di robotica leggera
Progettare un giunto robotico richiede un’attenta valutazione di molti fattori. Nella scelta dei motori per umanoidi, robot a zampe (o robot quadrupedi), robot collaborativi (cobot) e altre applicazioni di robotica leggera, ogni progetto specifico presenta esigenze proprie.
February 26, 2025
.png)
Che cos’è la robotica leggera?
I robot leggeri, o “light robots”, sono progettati per muoversi in modo efficiente su terreni incerti e in genere operano in stretta prossimità delle persone o in collaborazione con esse. Questi robot devono essere agili, mobili e robusti, ma non pericolosi. Devono inoltre essere in grado di resistere a urti e forze improvvise. Umanoidi, robot a zampe e cobot sono alcuni esempi di robot che rientrano in questa categoria.
Umanoidi
Gli umanoidi sono robot multiuso che assomigliano agli esseri umani. Spesso sono progettati per assistere o sostituire le persone in diverse attività, come svolgere faccende domestiche, sollevare e trasportare oggetti in fabbrica, oppure esplorare ambienti potenzialmente pericolosi. Per imitare il movimento umano, gli umanoidi sono dotati di più arti e giunti in movimento, ciascuno dei quali deve essere azionato da motori. Questi motori devono variare per dimensioni, forma e capacità per soddisfare le esigenze specifiche di ciascun giunto e attuatore.
Robot a zampe
I robot a zampe, come i quadrupedi, seguono un approccio progettuale simile a quello degli umanoidi, ma invece di assomigliare alle persone assomigliano agli animali (ad es. cani). Questi robot svolgono compiti come ispezione, esplorazione e consegna in ambienti che possono essere pericolosi o fisicamente sfiancanti per le persone. Assistendo il personale, questi robot aumentano la produttività migliorando al contempo la sicurezza. Come gli umanoidi, i robot a zampe richiedono motori robusti, leggeri e compatti per massimizzare il tempo operativo e gestire compiti impegnativi.
.png)
Robot collaborativi
I cobot, o robot collaborativi, sono progettati per lavorare al fianco delle persone in spazi condivisi. Svolgono attività come sollevare oggetti pesanti, prelevare e posizionare elementi con alta precisione e ripetibilità, oppure eseguire ispezioni. Poiché i cobot operano vicino alle persone, la sicurezza è una priorità assoluta. A differenza dei robot più grandi, che di norma sono isolati dietro barriere protettive, i cobot devono poter interagire con le persone in sicurezza.
Altri esempi di robot leggeri includono robot di esplorazione progettati per muoversi su terreni incerti, come le macerie dopo un terremoto o in profondità nelle cave. Questi robot devono adattarsi rapidamente e rispondere a improvvisi cambiamenti delle forze esterne.
L’importanza della densità di coppia
Nella progettazione di robot leggeri, i due fattori più critici da considerare sono peso e forza. Entrambi svolgono un ruolo chiave nella scelta degli attuatori per le articolazioni robotiche. Questi robot devono essere leggeri per operare a lungo, ma anche abbastanza robusti da svolgere compiti complessi. La densità di coppia è la chiave per raggiungere questo equilibrio.
I giunti di questi robot sono spesso collegati in serie, oppure devono sollevare il proprio peso, il che significa che i motori diventano parte del carico utile in movimento. Questo crea un effetto cumulativo su più stadi. Un’elevata densità di coppia garantisce che ciascun giunto possa erogare la forza necessaria riducendo al minimo il peso.
Soluzioni con riduttore
Un modo per ottenere un’elevata densità di coppia è ricorrere a soluzioni con riduttore. Una trasmissione ad ingranaggi può aumentare la coppia erogata da un motore più piccolo. Tuttavia, è anche essenziale considerare la back-drivability, ossia la capacità del motore di essere trascinato nel verso opposto quando viene applicata una forza esterna. Per esempio, se una persona afferra un braccio del robot e lo sposta in una direzione diversa, il motore/attuatore dovrebbe consentire questo movimento. Ciò è necessario per garantire interazioni sicure tra robot e persone, nonché per un trasporto agevole, soprattutto quando è spento.
Pertanto, si preferiscono trasmissioni con un basso rapporto di riduzione. Un rapporto basso garantisce che le forze di trascinamento all’indietro rimangano contenute, consentendo al contempo al giunto di rispondere in modo flessibile a urti improvvisi. I Quasi-Direct Drives (QDD) mostrano un comportamento simile ai direct drive, ma con un basso rapporto di trasmissione.
Misura della coppia nei giunti robotici
La misura della coppia è cruciale per la robotica leggera perché fornisce un feedback in tempo reale sulla coppia applicata in un giunto specifico. Questo feedback consente controllo preciso, sicurezza e un’interazione fluida con oggetti e persone. A tale scopo si utilizzano spesso sensori di coppia dedicati; tuttavia, essi aggiungono costi, massa e complessità. Se si possono eliminare le non linearità del giunto robotico, la coppia può essere misurata senza richiedere un sensore di coppia separato.
I Motori con alloggiamenti tradizionali hanno denti in ferro che concentrano il flusso magnetico. Questi denti in ferro creano un’interazione magnetica asimmetrica tra rotore e statore, con conseguente coppia di cogging. Al contrario, i Motori senza alloggiamenti utilizzano un semplice nucleo laminato a forma di anello, che elimina la coppia di cogging e porta a un comportamento più lineare. Inoltre, i Motori con alloggiamenti possono presentare problemi di saturazione sotto carichi elevati.
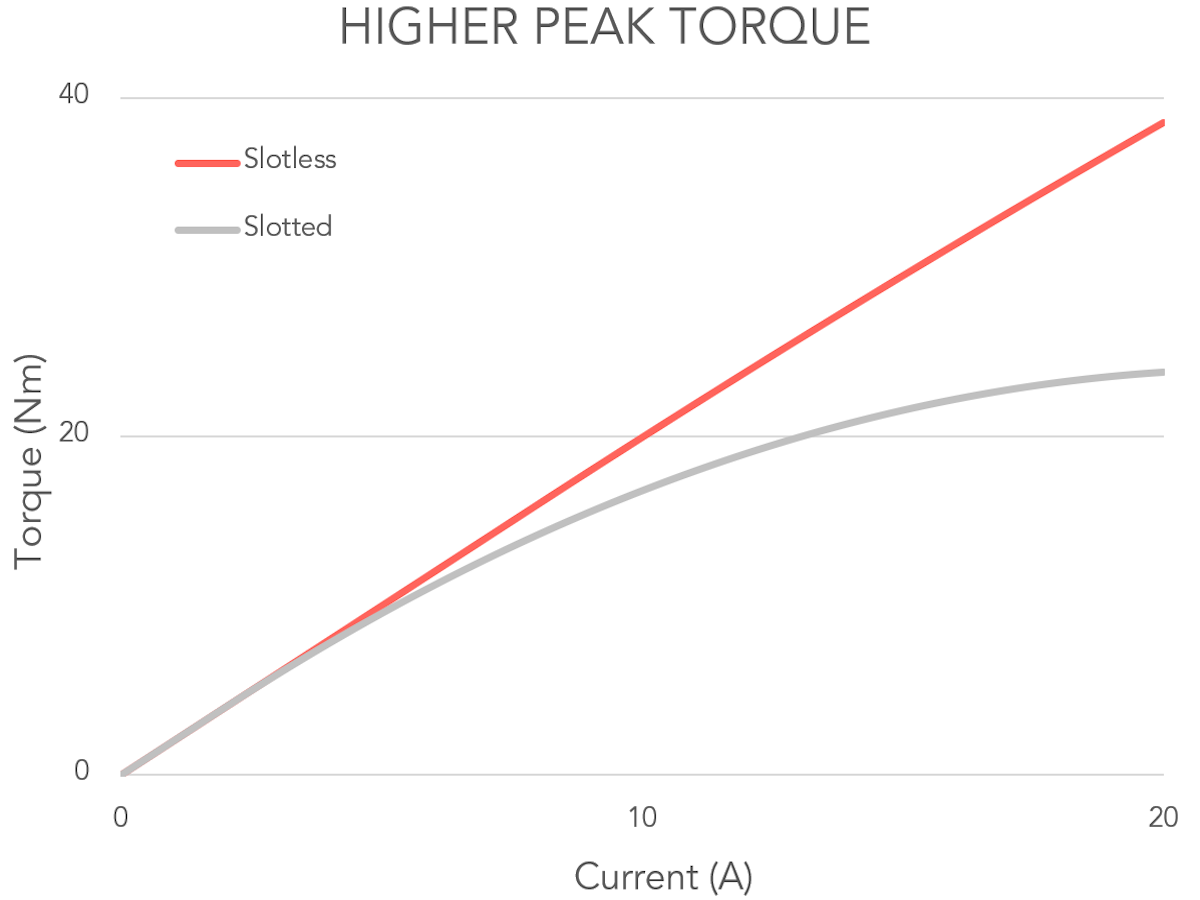
Che cos’è la saturazione di coppia e perché è un problema?
I robot devono essere precisi, robusti e veloci. Sotto carichi elevati, i Motori con alloggiamenti tradizionali possono andare in saturazione, causando perdite maggiori e un rapporto corrente-coppia non lineare. Al contrario, i Motori senza alloggiamenti, senza denti in ferro, non sperimentano saturazione. Ne risulta un comportamento corrente-coppia più lineare, che consente una coppia di picco più elevata e una migliore efficienza, in particolare nelle applicazioni dinamiche che richiedono alta coppia su un ampio intervallo di velocità.
Per maggiori informazioni, consulta: Motori senza alloggiamenti vs. Motori con alloggiamenti
Architettura ottimale del giunto robotico QDD
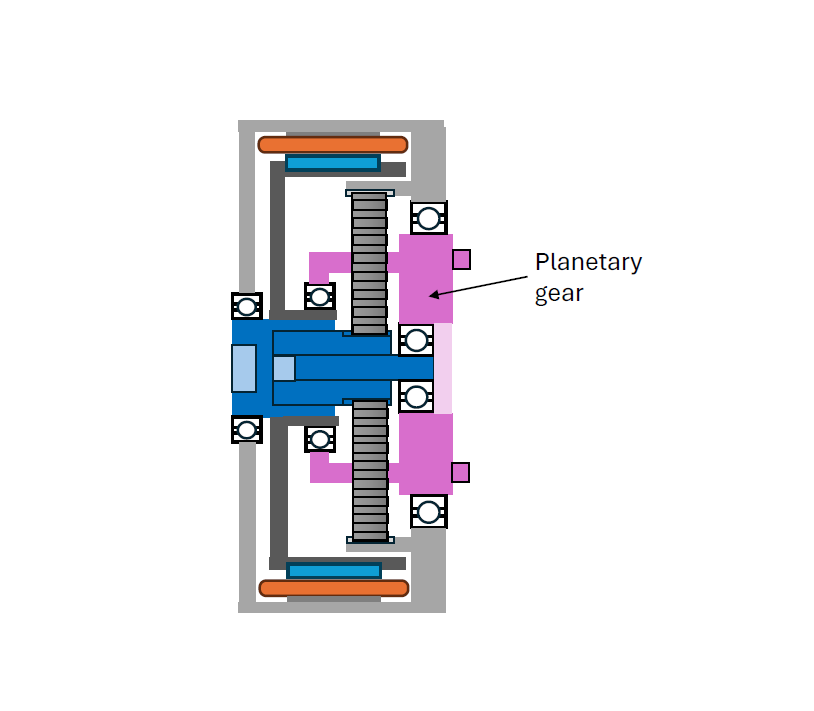
I giunti per la robotica leggera devono essere compatti. Di conseguenza, l’architettura del giunto introdotta dal MIT per l’attuatore Mini Cheetah ha guadagnato popolarità. Questo design prevede un riduttore posizionato al centro del motore, offrendo notevoli risparmi di ingombro. L’architettura si basa su motori out-runner, che forniscono un diametro interno sufficientemente grande da ospitare il riduttore. Tuttavia, ciò introduce sfide di raffreddamento e assemblaggio a causa del posizionamento fisico di statore e rotore. Il design richiede un grande alloggiamento attorno al rotore per supportare i cuscinetti su entrambi i lati dell’attuatore.
Un motore in-runner, invece, è una scelta migliore per questo tipo di attuatore. Elimina la necessità di un alloggiamento aggiuntivo e posiziona lo statore all’esterno, raddoppiando di fatto la superficie di raffreddamento per conduzione e migliorando significativamente la dissipazione del calore. Tuttavia, storicamente i motori in-runner non hanno avuto un diametro interno sufficientemente grande per soddisfare questo requisito.
Motori SlimTorq™ per la robotica leggera
I motori Alva SlimTorq™ FiberPrinted, Motori senza alloggiamenti, sono una scelta eccellente per queste applicazioni. Questi motori offrono una densità della costante del motore leader di mercato, combinando alta densità di coppia con un’efficienza migliorata. Lo statore FiberPrinted, geometricamente semplice, in combinazione con il rotore a schiera di Halbach, può essere ottimizzato per generare una back-EMF quasi perfettamente sinusoidale a tutti i livelli di coppia e temperature. Ciò si traduce in una coppia di cogging praticamente nulla e in capacità di coppia di picco più elevate, abilitando il comportamento dinamico e lineare corrente-coppia richiesto per un giunto robotico di alta qualità.
Inoltre, i motori SlimTorq™ presentano il più alto rapporto ID/OD, consentendo un design compatto che libera spazio al centro del motore, a differenza degli in-runner tradizionali. Questo rende più semplice integrare una soluzione con riduttore, riducendo l’ingombro complessivo del giunto robotico. Infine, la flessibile tecnologia di produzione fiber-printing consente di scalare i motori a qualsiasi dimensione, ottimizzando le prestazioni per ciascun progetto unico di giunto robotico. Per saperne di più sui motori Alva SlimTorq™ e sulle loro applicazioni nella robotica leggera, visita Alva Industries.
Contatti
Nicolas Giraudo
Chief Commercial Officer
Fossegrenda 1, 7038 Trondheim, Norway

Tutti i diritti riservati ©2025