Scelta degli attuatori per le articolazioni dei robot chirurgici
Scopri come la scelta degli attuatori giusti per le articolazioni robotiche chirurgiche migliori precisione e controllo nelle procedure complesse. Approfondisci i vantaggi dei motori di coppia compatti e come la tecnologia FiberPrinting™ ottimizza ingombri, potenza e personalizzazione per la chirurgia robotica di nuova generazione.
November 10, 2024
.avif)
La chirurgia robotica sta diventando sempre più popolare perché consente ai chirurghi di eseguire procedure complesse con maggiore precisione e controllo, offrendo una serie di benefici per i pazienti. Lo scetticismo iniziale legato all’idea che «un robot mi operi» continua a diminuire, anche grazie alla diffusione di altre soluzioni robotiche nella vita quotidiana, che si tratti di un umanoide che ti serve da bere in un bar o di un robot mobile che consegna la spesa.
Un elemento chiave che influenza le prestazioni complessive e le capacità del robot chirurgico è la progettazione e la composizione delle sue articolazioni. A causa di priorità progettuali diverse, nella maggior parte dei sistemi attualmente sul mercato si osservano variazioni. Questo si riflette nelle specifiche tecniche e nel design estetico. Nonostante tali variazioni, ci sono alcuni aspetti del sistema che quasi tutti i produttori stanno cercando di migliorare, tra cui dimensioni, sicurezza, velocità e consumo energetico (efficienza).
Questo articolo esamina diversi approcci di progettazione per le articolazioni robotiche e introduce una nuova tecnologia che viene adottata sempre più spesso dai produttori di robot chirurgici.

Attuatori nei robot chirurgici
Esistono diversi tipi di tecnologie di attuazione utilizzate nei sistemi di robotica chirurgica. Esistono inoltre diverse aziende che promuovono attuatori standard (off-the-shelf) con specifiche fisse. Le soluzioni off-the-shelf possono essere utili per i produttori di robot che stanno realizzando un prototipo iniziale o un sistema di prima generazione, perché possono ridurre il tempo di sviluppo. Tuttavia, nel lungo periodo, tali soluzioni vengono di solito eliminate dal progetto, poiché i produttori puntano a un livello di integrazione più elevato per soddisfare un insieme più specifico di specifiche, allineate alle prestazioni richieste e ai punti di differenziazione del sistema.
Che cosa comprende un giunto robotico?
Un giunto robotico è costituito da diversi componenti che consentono un movimento controllato. Le tipologie di componenti possono variare, ma in genere includono un motore, un sistema di ingranaggi/riduzione sotto forma di riduttore, encoder, cuscinetti, eventualmente sensori di coppia, un freno e un servo drive.
Questo articolo si concentrerà sui principali componenti meccanici: motore, ingranaggi/riduzione e freno.
Ingranaggi
In un giunto robotico, gli ingranaggi vengono utilizzati principalmente per trasmettere la coppia e controllare il movimento dell’articolazione. Il rapporto di trasmissione si riferisce alla relazione tra il numero di denti di due ruote dentate in presa oppure alle velocità di rotazione relative tra tali ingranaggi. Indica in quale misura la coppia di un motore viene aumentata o ridotta.
Il rapporto di trasmissione è tipicamente espresso come rapporto tra il numero di denti dell’ingranaggio condotto (quello che riceve potenza) e il numero di denti dell’ingranaggio conduttore (quello che fornisce potenza), oppure può essere rappresentato come rapporto tra le loro velocità di rotazione.
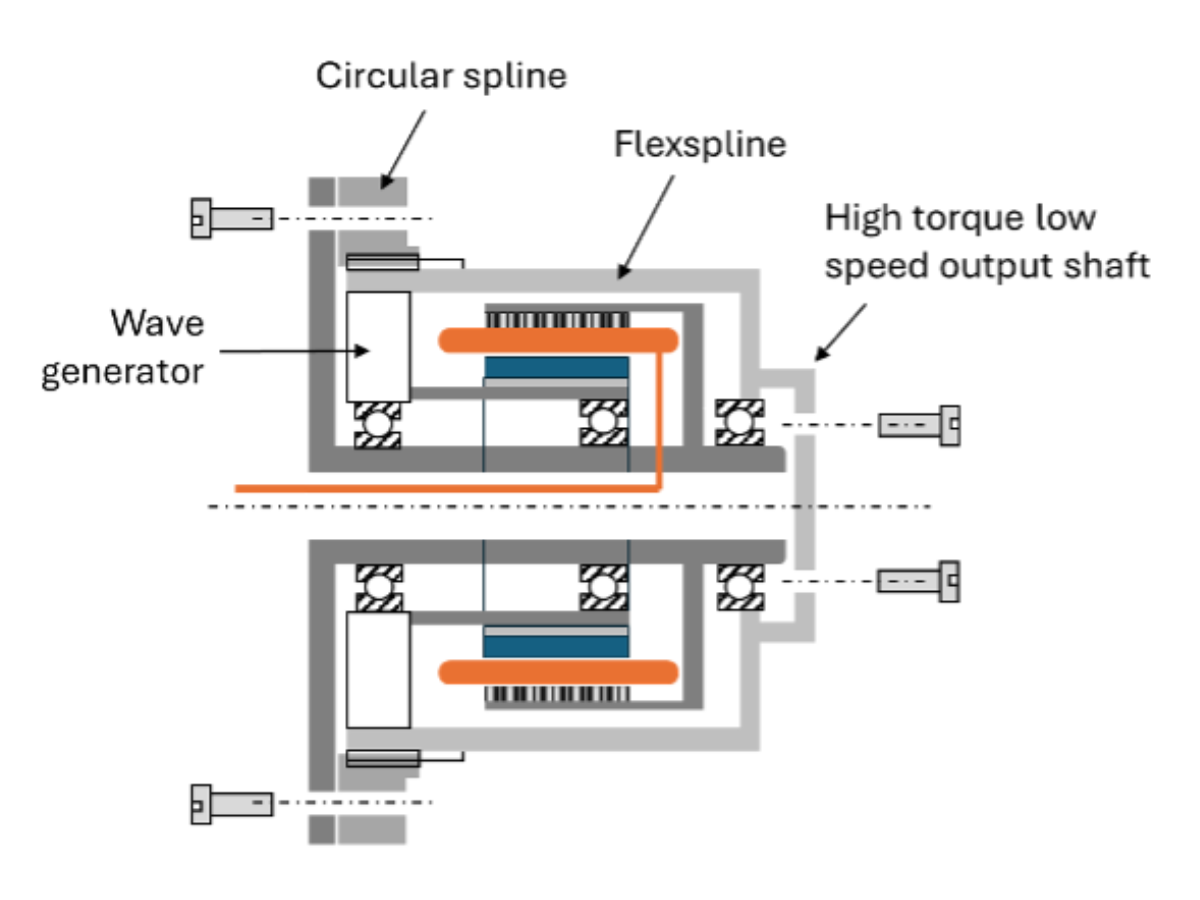
Esistono diverse tecnologie disponibili per la scelta di un riduttore per un giunto robotico e la selezione dipenderà dalle specifiche desiderate per l’applicazione robotica. Le soluzioni robotiche in chirurgia sono tipicamente a cinematica seriale. Nelle soluzioni a cinematica seriale la coppia richiesta sugli assi più grandi è piuttosto elevata e pertanto i rapporti di riduzione tendono a essere molto alti. In queste applicazioni si utilizzano tipicamente riduttori armonici (strain wave).
Motori
Uno dei fattori che influenzano la scelta del riduttore è il tipo di tecnologia di motore utilizzata nel giunto. La tecnologia a onda di deformazione (strain wave) è più comune quando si utilizzano motori frameless come tecnologia di azionamento, ossia la tecnologia scelta quando la compattezza è importante.
Quando si utilizzano altri tipi di motori, altre tecnologie di ingranaggi risultano più adatte, come la diffusissima integrazione di viti senza fine con motori BLDC.
I torque motor frameless offrono molti vantaggi progettuali in termini di compattezza, controllabilità, riduzione del peso e prestazioni. I torque motor possono anche fornire una coppia più elevata rispetto ai normali motori BLDC, consentendo un rapporto di riduzione più basso o, in alcuni casi, l’assenza totale di riduzione (vedi oltre). Più basso è il rapporto di riduzione, più è facile che il sistema sia retroazionabile (backdrivable), oltre a offrire una migliore efficienza, maggiore sensibilità e trasparenza (cioè la capacità di rilevare la coppia tramite la corrente applicata al motore).
Freni
Una delle sfide legate alla riduzione del rapporto di riduzione riguarda i freni. La cinematica seriale richiede un freno in quasi tutti gli assi, con alcune eccezioni talvolta come gli organi terminali o gli assi che si muovono solo orizzontalmente (perpendicolari alla gravità). Se il rapporto di riduzione viene diminuito, anche i freni dovrebbero essere in grado di produrre una coppia frenante più elevata, il che, a seconda della tecnologia utilizzata nei freni, potrebbe comportare anche dimensioni maggiori e un aumento di peso. Questo alla fine contraddirebbe o andrebbe contro l’obiettivo di ridurre peso e dimensioni di motori e riduttori.
I freni elettromagnetici, tuttavia, sono migliorati negli ultimi anni e oggi freni molto leggeri possono fornire un’elevata coppia frenante, risultando al contempo scalabili e personalizzabili.
Uso di azionamenti diretti nei robot chirurgici
Non tutti gli assi dell’articolazione di un robot chirurgico richiedono attuatori con riduttore. Un organo terminale o il «polso» può essere risolto anche utilizzando un torque motor senza riduzione. Una soluzione direct drive in questo tipo di applicazioni può offrire diversi benefici in termini di riduzione di dimensioni e peso, elevate prestazioni dinamiche e minori costi. Vedi Una guida ai torque motor per saperne di più.
Se i torque motor offrono tali benefici, ci si potrebbe chiedere perché i produttori non progettino un intero robot senza ingranaggi, utilizzando solo azionamenti diretti. Alcune cinematica parallele hanno dimostrato che questo design è fattibile; tuttavia, per la cinematica seriale questa soluzione è poco comune, a causa della scarsa robustezza che un sistema del genere avrebbe, un problema per i sistemi che richiedono un’elevata stabilità.
Motori di coppia di precisione con tecnologia FiberPrinted™
Integrare torque motor in un attuatore con riduttore richiede un’attenta valutazione. Una tendenza in crescita nel settore della robotica chirurgica e in altre applicazioni di precisione è l’utilizzo di motori di coppia di precisione realizzati con tecnologia FiberPrinted™.
FiberPrinting™ è un metodo industriale di avvolgimento che consente l’avvolgimento continuo di materassini di statore per motori ironless e Motori senza alloggiamenti. Questo metodo massimizza il fattore di riempimento del rame e consente una personalizzazione precisa di dimensioni & configurazione dello statore, offrendo la combinazione ottimale di densità di coppia e precisione in un form factor sottile e leggero.
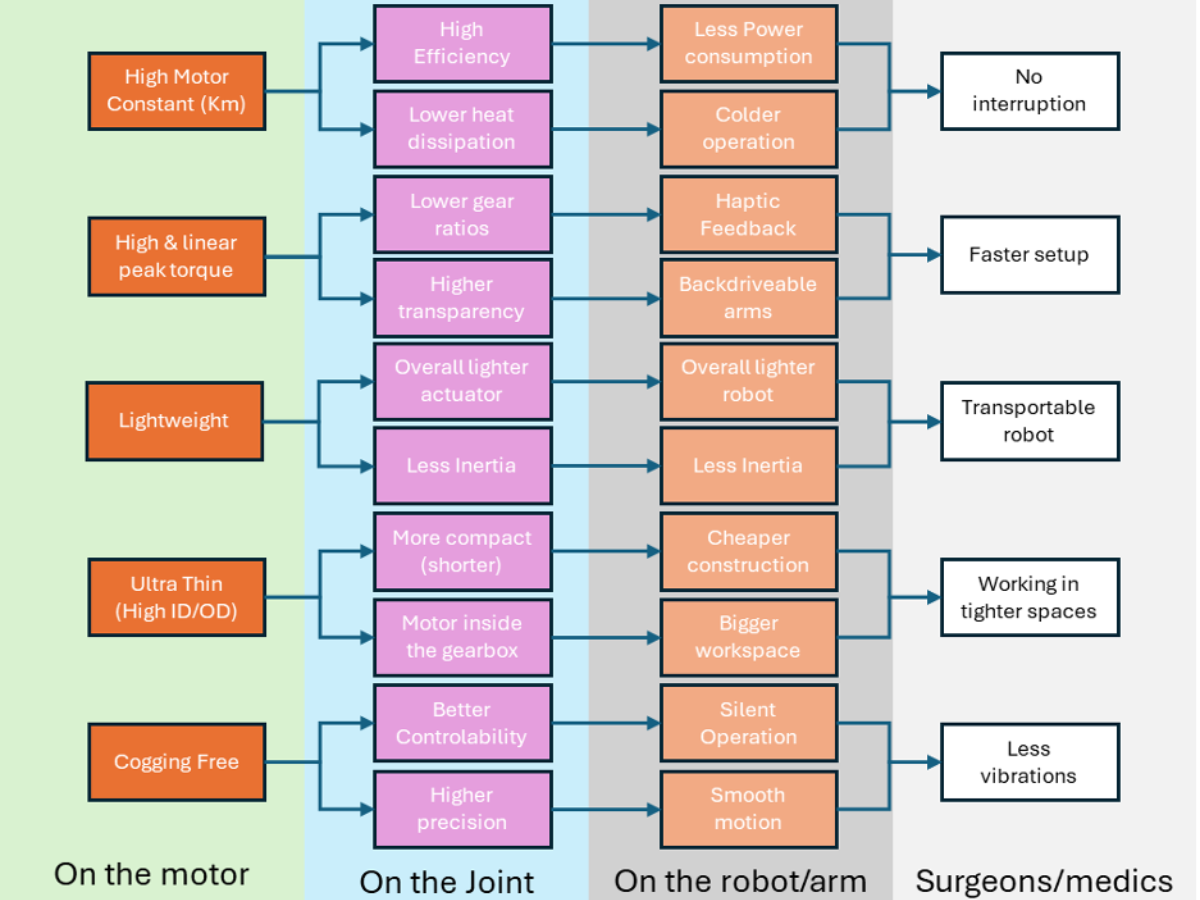
Questi motori ultrasottili consentono una completa integrazione all’interno di un riduttore (concetto espresso in Figura 3) e la loro progettazione coreless permette inoltre ai torque motor di operare a velocità più elevate.
Ulteriori informazioni sono disponibili in questo articolo: Motori senza alloggiamenti vs. Motori con alloggiamenti: qual è la differenza?.
.png)
La capacità offerta da FiberPrinting™ di integrare soluzioni compatte si traduce in diversi benefici, non solo per chi progetta la meccatronica, ma anche per i produttori di robot chirurgici e per i chirurghi utilizzatori finali. Come mostrato nella Figura 3 qui sotto.

Tutti i diritti riservati ©2025