Topologie Outrunner e Inrunner spiegate: leva della coppia, inerzia e limiti di sistema
La selezione dell’architettura ottimale di un motore brushless — outrunner o inrunner con grandi fori passanti — definisce i limiti di sistema. Gli outrunner massimizzano il raggio del traferro per generare una coppia statica più elevata, mentre gli inrunner riducono l’inerzia per una banda passante dinamica e una dissipazione termica superiori. Questo articolo analizza i principi fisici e i compromessi geometrici che guidano la selezione del motore nella meccatronica avanzata.
March 17, 2026
.png)
Outrunner Vs. Inrunner: differenze fisiche
.png)
I motori brushless sono classificati in due design distinti: inrunner e outrunner. La differenza determinante è che l’alloggiamento esterno di un outrunner ruota attorno a una struttura interna. Anche nei sistemi meccatronici integrati in cui il motore non è visibile, questa distinzione architetturale rimane fondamentale. Le differenze tra l’assieme rotore e statore sono le seguenti:
Gruppo rotore:
- I magneti di un outrunner sono montati sulla superficie interna del rotore, un guscio esterno rotante sottile, o “campana”. Questa configurazione massimizza il raggio di coppia posizionando il traferro attivo alla massima distanza dal centro di rotazione. Poiché la rotazione è concentrata alla periferia esterna, componenti come corone dentate o pulegge possono essere fissati al guscio esterno del motore.
- Gli inrunner presentano magneti fissati a un corpo rotante interno, che concentra la massa vicino all’asse di rotazione e riduce il raggio effettivo del traferro. Questo raggio ridotto minimizza l’inerzia rotazionale e consente cuscinetti più piccoli, migliorando in modo significativo la dinamica di rotazione. Questa topologia è ideale per collegamenti tradizionali azionati da albero.
Gruppo statore: - Lo statore di un outrunner è un nucleo elettromagnetico stazionario montato su una struttura centrale.
- Lo statore di un inrunner è un elemento elettromagnetico stazionario montato all’interno dell’alloggiamento cilindrico esterno

Differenze elettromagnetiche e leva dipendente dal raggio: un vantaggio dell’outrunner
Dal punto di vista elettromagnetico, la coppia del motore è determinata dall’interazione tra raggio del traferro, lunghezza assiale attiva e sforzo di taglio elettromagnetico. Questa relazione è critica nel confronto tra architetture, poiché la scalatura geometrica determina direttamente densità di coppia, efficienza e prestazioni continue. La relazione di coppia governante è:
Coppia T = 2π·σs·r²·L(Nm)
dove:
r è il raggio effettivo del traferro (m)
L è la lunghezza assiale attiva (m)
σs è lo sforzo di taglio elettromagnetico (N/m²)
Poiché la coppia è proporzionale al quadrato del raggio (T ∝ r²), anche aumenti marginali del diametro del traferro producono guadagni sostanziali in vantaggio meccanico. Il principale elemento distintivo è la leva geometrica:
- Un outrunner utilizza il raggio massimo disponibile entro uno specifico diametro esterno (OD) per massimizzare il braccio della coppia. Questo genera una costante di coppia (Kt) più elevata per unità di corrente, riducendo le perdite ohmiche necessarie per mantenere una posizione statica di mantenimento.
- Al contrario, l’inrunner possiede intrinsecamente un braccio di coppia più piccolo perché i magneti sono più vicini al centro. Per eguagliare la stessa coppia in uscita, il motore deve aumentare la lunghezza assiale o funzionare con maggiore corrente. In design con spazio limitato o motori sottili, ciò comporta un carico elettrico e un riscaldamento più elevati, spesso creando un vincolo termico.
Controforza elettromotrice (Back-EMF):
- Gli outrunner favoriscono un numero di poli magnetici più elevato e una Back-EMF maggiore per giro, risultando in una costante di tensione più grande (Ke in V/kRPM). Questo fenomeno deriva direttamente dal diametro maggiore dell’outrunner. Di conseguenza, gli outrunner ad alto Ke sono spesso impiegati in scenari direct-drive per sfruttare questo vantaggio intrinseco.
- Gli inrunner, all’interno di una classe dimensionale standardizzata, tipicamente mostrano una costante di tensione Ke più piccola. Queste configurazioni sono spesso ottimizzate per funzionamenti a velocità più elevata e possono essere combinate con una riduzione a ingranaggi quando si desidera una moltiplicazione della coppia a livello applicativo.
Inerzia e risposta dinamica: un vantaggio dell’inrunner
La sola coppia non determina le prestazioni dinamiche del movimento. L’inerzia rotazionale (J) rappresenta la resistenza di un corpo alle variazioni di velocità angolare. Un’inerzia più elevata richiede più coppia per accelerare o decelerare, rallentando intrinsecamente la reattività del sistema. L’accelerazione angolare (α) determina la banda passante dinamica e il tempo di risposta del sistema.
Inerzia rotazionale: J ∝ m·r² (kg·m²)
Accelerazione angolare: α = T / J (rad/s²)
dove:
m è la massa del rotore (kg)
r è il raggio effettivo del traferro (m)
Per tutti i motori a flusso radiale, la coppia scala con il quadrato del raggio del traferro (T ∝ r²). Se gli outrunner offrono una leva superiore sulla coppia statica grazie al grande raggio, la realtà geometrica di posizionare la massa lontano dall’asse di rotazione penalizza fortemente la reattività dinamica. Poiché topologie di motore diverse impongono dimensioni fisiche e materiali molto differenti a parità di ingombro, un confronto diretto richiede di osservare esattamente come l’accelerazione angolare scala con la dimensione.
- Gli outrunner: a parità di ingombro, massimizzano la leva di coppia tramite un grande raggio effettivo del traferro, ma si basano su un pesante ferro di ritorno. Questa massa dell’alloggiamento (m), semplificata come guscio sottile, scala linearmente con la circonferenza (m ∝ r), facendo sì che l’inerzia rotazionale scali alla terza potenza (J ∝ r³). Pertanto, l’accelerazione angolare scala inversamente con il raggio (α ∝ 1/r). Questa elevata inerzia assoluta riduce l’accelerazione angolare del sistema, rendendo gli outrunner meno adatti a movimenti dinamici ad alta frequenza.
- Motori con alloggiamenti inrunner: il rotore ruota centralmente, vincolato a un diametro assoluto molto più piccolo dai voluminosi denti di statore circostanti. Poiché questi rotori richiedono un nucleo in acciaio pieno per trasportare il flusso magnetico, non sono modellati come gusci sottili; la loro massa scala quadraticamente (m ∝ r²) e la loro inerzia rotazionale scala ripidamente alla quarta potenza (J ∝ r⁴). Di conseguenza, l’accelerazione scala inversamente con il quadrato del raggio (α ∝ 1/r²). Nonostante questa severa penalizzazione di scalatura, un inrunner concentra la massa molto più vicino all’asse di rotazione, al punto che la drastica riduzione dell’inerzia assoluta supera ampiamente la riduzione del braccio di coppia. Questo produce tempi di risposta significativamente più rapidi e una banda passante ad anello chiuso più elevata, privilegiando la dinamica rispetto alla coppia statica.
- Motori senza alloggiamenti inrunner: (come lo SlimTorq™ di Alva) eliminano i voluminosi denti di statore, consentendo al rotore interno di espandersi più vicino al diametro esterno del motore per catturare una leva magnetica simile a quella di un outrunner. Inoltre, un array Halbach auto-schermante elimina la necessità di un pesante giogo di ritorno del flusso in acciaio, consentendo una bussola del rotore in alluminio ultra-leggera. Questa topologia mantiene una scalatura favorevole da guscio sottile (J ∝ r³, α ∝ 1/r) ma riduce drasticamente la massa assoluta di base (m). La riduzione di massa domina la penalità 1/r, risultando in un elevato rapporto T/J e offrendo alta coppia e accelerazione angolare.
Gestione termica: un vantaggio dell’inrunner
La coppia continua del motore è fondamentalmente limitata dalla dissipazione termica dello statore. Le temperature sicure dell’isolamento degli avvolgimenti e la stabilità dei magneti determinano la corrente e la coppia ammissibili. Le macchine Motori con alloggiamenti affrontano limiti di coppia di picco a causa della saturazione magnetica nei denti di statore. Nei design Motori senza alloggiamenti, dove la saturazione è trascurabile, la coppia di picco transitoria beneficia direttamente di un migliore raffreddamento a livello applicativo.
Resistenza termica: Rth ∝ 1 / (reff·L)
dove:
reff è il raggio della superficie che dissipa termicamente (mm)
L è la lunghezza assiale attiva (mm)
Assumendo un raffreddamento limitato dalla superficie, la resistenza termica di un motore verso l’ambiente (Rth, misurata in °C/W) scala inversamente con la sua area di superficie che smaltisce calore (Rth ∝ 1 / (reff·L)). Poiché la capacità di dissipazione del calore scala linearmente con questo raggio, l’architettura determina le prestazioni continue.
Gestione termica:
- L’architettura inrunner è superiore per un’elevata coppia continua perché l’energia termica viene respinta radialmente verso l’esterno. Poiché lo statore — la principale sorgente di calore — è incollato all’alloggiamento esterno, l’energia si dissipa efficientemente per conduzione verso l’ambiente o tramite raffreddamento a liquido.
- Gli outrunner invece trattengono il calore all’interno di un nucleo stazionario, creando una "isola termica". Ciò richiede un raffreddamento complesso o un derating/riduzione per vincoli termici severo per prevenire il cedimento dell’isolamento. Inoltre, il calore condotto nel piccolo albero e nei cuscinetti può compromettere la lubrificazione e l’affidabilità meccanica.
Integrazione meccanica e vincoli di sistema
Le architetture frameless ottimizzano il design del sistema, offrendo libertà di definire rotazione, trasferimento di coppia e flusso delle forze attraverso componenti integrati.
Capacità di foro passante:
Storicamente, gli outrunner erano preferiti per grandi aperture poiché il loro raggio di coppia è indipendente dal foro passante. Al contrario, l’espansione del foro passante di un inrunner Motori con alloggiamenti riduce lo spazio per denti di statore e avvolgimenti, causando penalizzazioni di coppia severe. La tecnologia Motori senza alloggiamenti FiberPrinting™ ridefinisce questo paradigma: eliminando i denti in ferro e raggiungendo fino a un 60% di Copper Fill Factor, i motori SlimTorq™ consentono rapporti ID/OD fino a 86.2%. Questo permette di instradare slip ring, ottiche e cablaggi centralmente senza le penalizzazioni prestazionali o termiche dei design convenzionali.
Efficienza dell’apertura: SlimTorq™ Lite Series
I dati seguenti mostrano la capacità di apertura lungo il portafoglio SlimTorq™ Lite (L):

Integrazione dei cuscinetti e percorsi di carico:
Gli inrunner tradizionali utilizzano cuscinetti centrali per minimizzare le velocità lineari. I motori Motori senza alloggiamenti a grande apertura — sia inrunner sia outrunner — possono utilizzare cuscinetti di grande diametro e a sezione sottile per un supporto superiore dei carichi a momento. Nei thruster rim-drive, un rotore inrunner con un foro passante sufficientemente grande può collegarsi direttamente al bordo dell’elica. Questo elimina l’albero centrale e riduce la resistenza idrodinamica, sfruttando al contempo i vantaggi termici intrinseci dell’architettura.
Protezione ambientale:
- L’architettura inrunner supporta naturalmente design chiusi in cui un guscio esterno stazionario scherma il traferro da contaminanti come umidità o particolato. L’aggiunta di cuscinetti schermati aumenta ulteriormente la protezione.
- Gli outrunner spesso rimangono aperti per facilitare il raffreddamento dello statore, esponendo il traferro all’ingresso di particolato e al degrado. Sebbene si possano aggiungere guarnizioni secondarie di grande diametro, queste aumentano l’attrito e riducono l’efficienza.
.png)
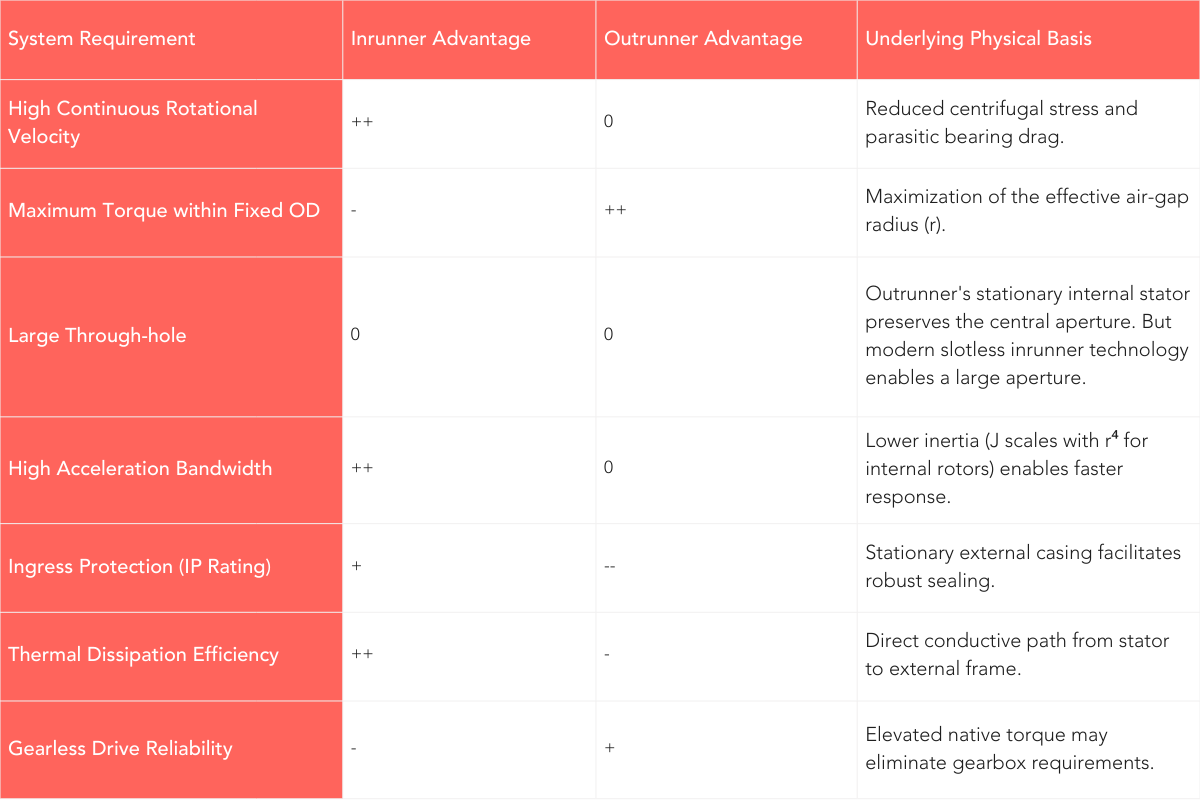
Matrice di selezione architetturale
Una selezione architetturale appropriata può basarsi su requisiti di sistema prioritizzati:
Implementazione inrunner Motori senza alloggiamenti
Storicamente, gli inrunner sacrificavano la leva di coppia per la risposta dinamica, ma i moderni design Motori senza alloggiamenti eliminano questo compromesso tramite l’ottimizzazione di statore e rotore. Sostituendo uno statore in ferro Motori con alloggiamenti con uno statore FiberPrinted™ ad alta densità e non skewed si aumenta il raggio effettivo del traferro (r) entro lo stesso inviluppo. Ciò espande il braccio della coppia per migliorare la leva mantenendo bassa inerzia e dissipazione termica efficiente. Inoltre, i rotori con array Halbach aumentano la densità di flusso senza un pesante ferro di ritorno nel rotore, migliorando l’utilizzo magnetico e riducendo ulteriormente massa e inerzia.
Conclusione
Le differenze tra outrunner e inrunner sono state spiegate tramite vincoli dipendenti dal raggio. La scelta di utilizzare un tipo abiliterà o limiterà un sistema di controllo del movimento.
- Le soluzioni outrunner sono più adatte a un’elevata coppia statica. Se il motore può anche fungere da componente strutturale portante, questi requisiti possono essere soddisfatti efficacemente.
- Le soluzioni inrunner sono ideali per sistemi ottimizzati per velocità e comportamento dinamico, offrendo una gestione termica superiore e capacità di movimento ad alta frequenza necessarie per posizionamento e stabilizzazione rapidi.
Queste differenze si riducono grazie ai progressi dei motori di coppia inrunner Motori senza alloggiamenti, che non presentano le limitazioni dinamiche o termiche degli outrunner.
La valutazione di sistemi reali richiede l’analisi di compromessi specifici dell’applicazione oltre alla topologia di base. I white paper citati li analizzano nel contesto, inclusi vincoli termici negli attuatori QDD, saturazione nelle macchine Motori con alloggiamenti e benefici dei grandi diametri di foro passante. Integrando fattori elettromagnetici, meccanici e termici, questi documenti definiscono le prestazioni reali di un sistema e il costo totale di proprietà.
---
Riferimenti
Alva Industries A/S. (2025). *Slim2Real: SlimTorq™ powered AI actuators and QDD actuator design considerations*. Trondheim, Norvegia: Alva Industries A/S.
Alva Industries A/S. (2025). *Large through-hole diameter: Integration benefits in prosthetics and robotics*. Trondheim, Norvegia: Alva Industries A/S.
Alva Industries A/S. (2025). *Technical inefficiencies and total cost of ownership in precision gimbals*. Trondheim, Norvegia: Alva Industries A/S.

Tutti i diritti riservati ©2025